

Классификация дпт:
ДПТ классифицируют по виду магнитной системы статора:
-
с постоянными магнитами;
-
с электромагнитами:
-
с независимым включением обмоток (независимое возбуждение);
-
с последовательным включением обмоток (последовательное возбуждение);
-
с параллельным включением обмоток (параллельное возбуждение);
-
со смешанным включением обмоток (смешанное возбуждение):
-
с преобладанием последовательной обмотки;
-
с преобладанием параллельной обмотки;
-
-
Вид подключения обмоток статора существенно влияет на тяговые и электрические характеристики электродвигателя.
Рассмотрим, как меняется структура сервопривода, измерительного устройства и управляющего устройства. На рисунке 2.4 представлены различные механизмы управления исполнительным механизмом

Рисунок 2.4 – Различные варианты управления исполнительным механизмом
а) – управление по цепи якоря с независимым возбуждением, где управляющее воздействие – напряжение якоря, а питание const;
б) – управление по цепи возбуждения с независимым возбуждением;
в) – управление с параллельным возбуждением;
г) – управление с последовательным возбуждением.
Достоинства:
-
простота устройства и управления;
-
практически линейные механическая и регулировочная характеристики двигателя;
-
легко регулировать частоту вращения;
-
хорошие пусковые свойства (большой пусковой момент);
-
так как ДПТ являются обратимыми машинами, появляется возможность использования их как в двигательном, так и в генераторном режимах.
Недостатки :
-
дороговизна изготовления;
-
необходимость профилактического обслуживания коллекторно-щёточных узлов;
-
ограниченный срок службы из-за износа коллектора.
3.Выбор режима и вид движения Двигатель-маховик выполняет вращательное движение, тем самым создавая момент, который разворачивает ка в сторону, обратную от той, которую создает возмущающий момент.
 ,
,
где
 – момент инерции
маховика;
– момент инерции
маховика;
 – угловое
ускорение маховика .
– угловое
ускорение маховика .
Двигатель-маховик работает в режиме позиционирования. Это говорит о том, что когда двигатель совершит определенное количество оборотов необходимое для стабилизации КА, он остановится.
4. ОЦЕНКА СОСТОЯНИЯ ПРОБЛЕМЫ
Системы угловой стабилизации с двигателями-маховиками строятся по принципу замкнутых систем автоматического регулирования. Конструктивная простота в сочетании с достаточно высокой точностью объясняют тот факт, что эти системы одними из первых нашли практическое применение. Основными недостатками систем с двигателями-маховиками является ограниченный ресурс и способность входить в режим насыщения. Первый недостаток объясняется наличием трущихся частей (подшипники привода и маховика), второй - максимально допустимой скоростью вращения. В основу принципа действия систем, использующих в качестве исполнительных органов вращающиеся массы, положен закон сохранения момента количества движения. Основными режимами работы систем с двигателями-маховиками являются: режим стабилизации (ориентации) углового положения аппарата; режим сброса кинетического момента; режим программных разворотов; режим стабилизации угловой скорости аппарата, стабилизированного вращением. Изменение угловой скорости маховика может быть достигнуто торможением или разгоном за счет приложения к маховику постоянного или переменного во времени момента MR (t). Характер момента определяется типом привода. Для компенсации постоянно действующего момента Мz маховик должен постоянно разгонять. После того как скорость маховика достигнет предельного значения, момента Mz ничто не будет препятствовать отклонять аппарат, т.е. система входит в режим насыщения.Вернуть ее в рабочее состояние можно только с помощью других исполнительных органов, например реактивных сопел или электрических катушек. Начало режима насыщения определяется с помощью датчика угловой скорости, установленного на валу двигателя-маховика. В режиме сброса кинетического момента маховик тормозится до нулевой, либо номинальной скорости. Резервные исполнительные органы при этом должны создать управляющий момент, превышающий сумму момента внешних сил и моментов, возникающего при торможении маховика. Если необходимо осуществить программные развороты КЛА, то к маховику должен быть приложен момент ± Mд (t). Выбор знака этого момента зависит от направления разворота. Реактивный момент ± МД вызовет появление угловой скорости КЛА. По мере приближения аппарата к программному значение угла угловая скорость и возникшие при этом колебания должны демпфируватися. Вращающийся маховик как аккумулятор кинетической энергии может быть использован для поддержания постоянства угловой скорости КЛА, стабилизированных вращением. В этом режиме торможения заранее раскрученного маховика эквивалентно компенсации потерь скорости собственного вращения аппарата, обусловленных различными тормозящими факторами. В системах с ДМ могут использоваться линейные и нелинейные законы управления. Выбор закона управления обусловливается требованиями точности, предъявляемыми к системе. При выборе закона управления необходимо также исходить из наличия технологически отработанных элементов: датчиков углового положения, устройств для привода маховиков и т.п.
В качестве исходных конфигураций размещения двигателей-маховиков с минимальной избыточностью на космическом аппарате выберем следующие варианты:
-Схему предусмотренной стандартами NASA в рамках проекта многоцелевой модульной платформы MMS, представленной на рис.4.1;
-Схему установки исполнительных органов фирмы General Electric, с кинетическими моментами двигателей-маховиков, направленных из середины куба (рис.4.2);
-Схему одного из альтернативных вариантов, что удовлетворяет принципу
построения гиростабилизаторов(рис.4.3).

Рисунок 4.1 - Схема установки NASA
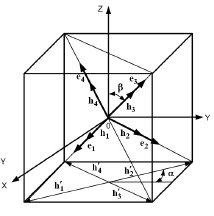
Рисунок 4.2 - Схема установки General Electric

Рисунок 4.3 - Схема установки альтернативная
Проведем анализ уже существующих проблем. Для этого составим таблицу патентов.
Таблица патентного анализа приведена в приложении в таблице 2.