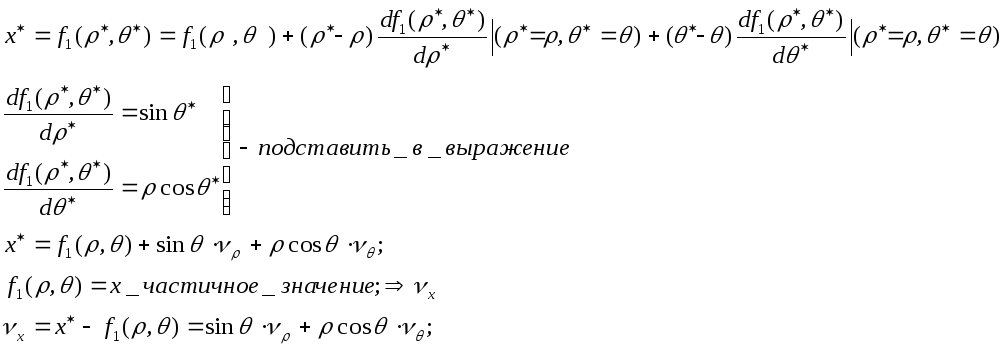
7. Вывод выражения для случайной ошибки определения координаты х, после пересчета измерений из полярной системы координат:
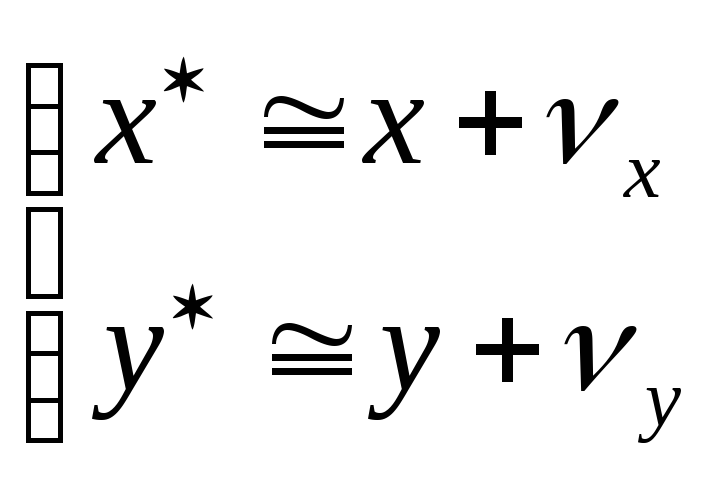
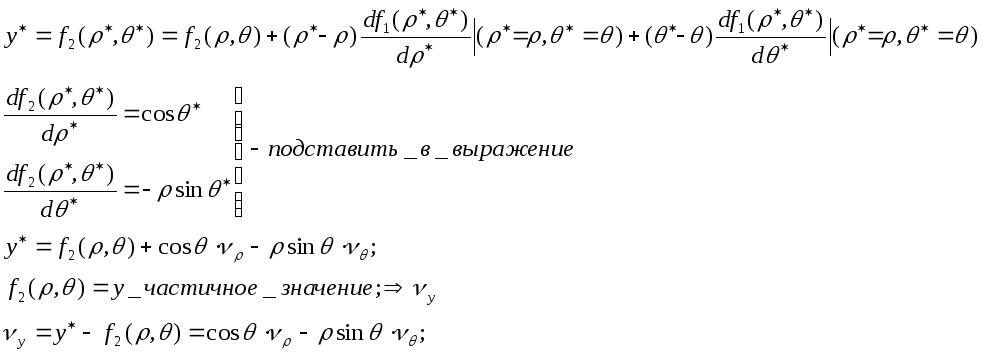
8. Вывод выражения для случайной ошибки определения координаты y, после пересчета измерений из полярной системы координат:
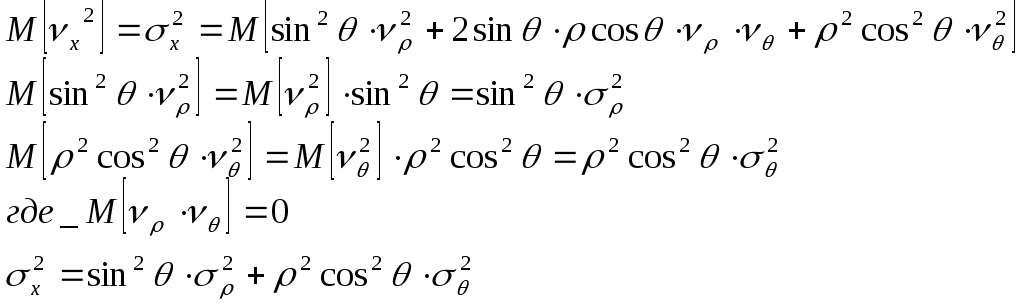
9. Вывод выражения для дисперсии ошибки определения координаты х, после пересчета измерений рлс из полярной системы координат
5. Изучение влияния ошибок рлс на точность и достоверность определения местоположения вс
В АС УВД основными источниками координатной информации о местоположение ВС являются радиолокационные станции (РЛС). измеряющие наклонную дальность ρ до
ВС и азимут в (рисунок 1).
Ошибки измерения имеют систематическую и случайную составляющие. Обычно считается, что систематическая ошибка скомпенсирована. Случайные ошибки обусловлены влиянием большого количества факторов и подчинены нормальному закону распределения с параметрами (θ,σ ). Ошибки измерения дальности vp и азимута vq являются аддитивными, т.е. результаты измерения, поступающие в i-й момент времени (обзоре локатора), которые обозначим р и θ . можно записать в виде
![]()
Для обзорных РЛС, у которых период обзора
составляет 5...20 с, случайные ошибки
измерения можно считать независимыми
во времени, что математически записывается
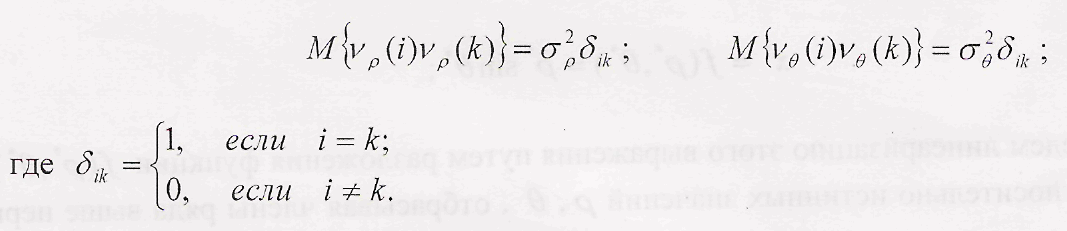
Для установленных интервалов
дальности дисперсия ошибок измерения
дальности и азимута считаются постоянными
![]()
![]()
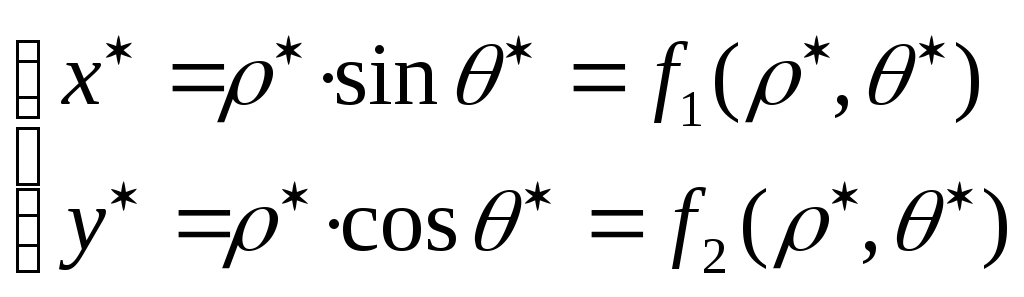
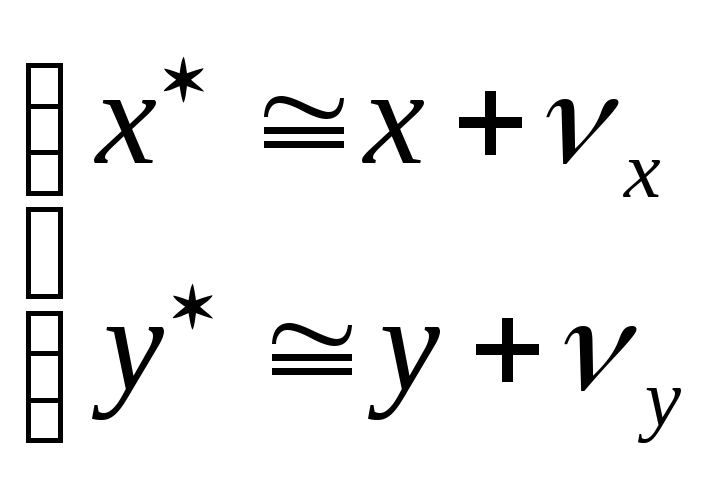
В АС УВД как правило радиолокационные измерения, прежде чем поступить на обработку, преобразуются из полярной системы координат в прямоугольную:
![]()
В этом случае связь координат х, у с измеряемыми параметрами р , в' имеет нелинейный вид и. следовательно, статистические характеристики ошибок определения прямоугольных координат теряют свойство аддитивности, а также свойство постоянства, т.к. они становятся зависимыми от местоположения ВС.

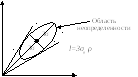
4. Ошибки измерения. Эллипс правдоподобия.Ошибки измерения по дальности σρ и по азимуту σθ. P(a≤S≤b). P(-3σ≤S≤+3σ) 0.99
σρ, σθ постоянны, ошибка умножается на 3, т. е. σρ=100 м, то 300м вправо и влево, зона неопределенности 600 м