

24) Математическая модель равномерного прямолинейного полета самолета:
Линейная математическая модель движения ВС:
![]() где
X
- вектор
состояний размерности n,
Ф - переходная матрица системы, определяющая
переход из состояния в момент (i-1)
в состояние в момент (i);
матрицы В'
и
G'
где
X
- вектор
состояний размерности n,
Ф - переходная матрица системы, определяющая
переход из состояния в момент (i-1)
в состояние в момент (i);
матрицы В'
и
G'
Математическая модель измерений представляет собой линейную функцию от компонент вектора состояний
![]()
где z
- вектор измеряемых параметров размером
т;
С -матрица,
устанавливающая
связь измерений с элементами вектора
состояний, размером (т_п):
![]() - нормальный случайный вектор ошибок
измерений типа "дискретный белый
шум" со статистическими характеристиками,
аналогичными характеристикам возмущающего
воздействия, т.е.
- нормальный случайный вектор ошибок
измерений типа "дискретный белый
шум" со статистическими характеристиками,
аналогичными характеристикам возмущающего
воздействия, т.е.
![]()
При
независимых ошибках
![]() - матрица
квадратов среднеквадратических ошибок
измерений.
- матрица
квадратов среднеквадратических ошибок
измерений.
Предполагается,
что случайные возмущения, ошибки
измерения и элементы вектора состоянии
некоррелированы, т.е.
![]() при любых i,j.
В
качестве критерия оптимальности
опенки состояний принимают минимум
среднеквадратической
ошибки
т.е.
минимум
суммы среднеквадратических ошибок
оценок отдельных составляющих
вектора
состояний
при любых i,j.
В
качестве критерия оптимальности
опенки состояний принимают минимум
среднеквадратической
ошибки
т.е.
минимум
суммы среднеквадратических ошибок
оценок отдельных составляющих
вектора
состояний

Статистические
свойства вектора ошибок оценки
![]() характеризуются
корреляционной матрицей ошибок оценки
характеризуются
корреляционной матрицей ошибок оценки
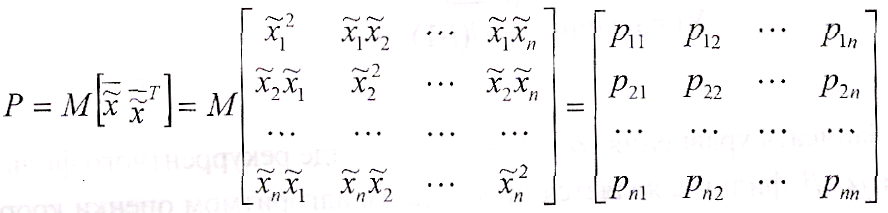
в
которой
диагональные
элементы представляют собой
дисперсии ошибок оценок составляющих
вектора состояний, т.е.
![]()
![]()
![]()
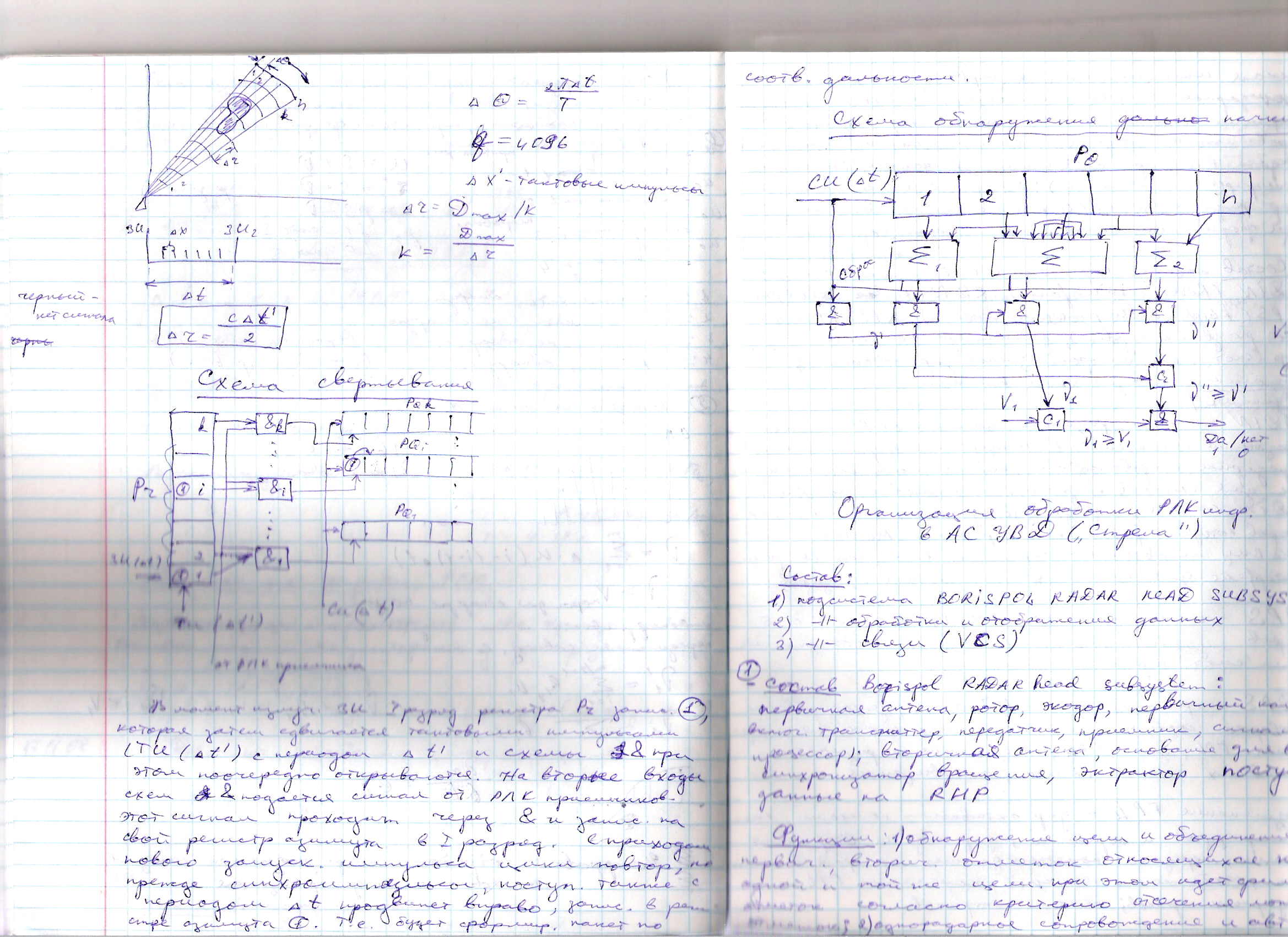
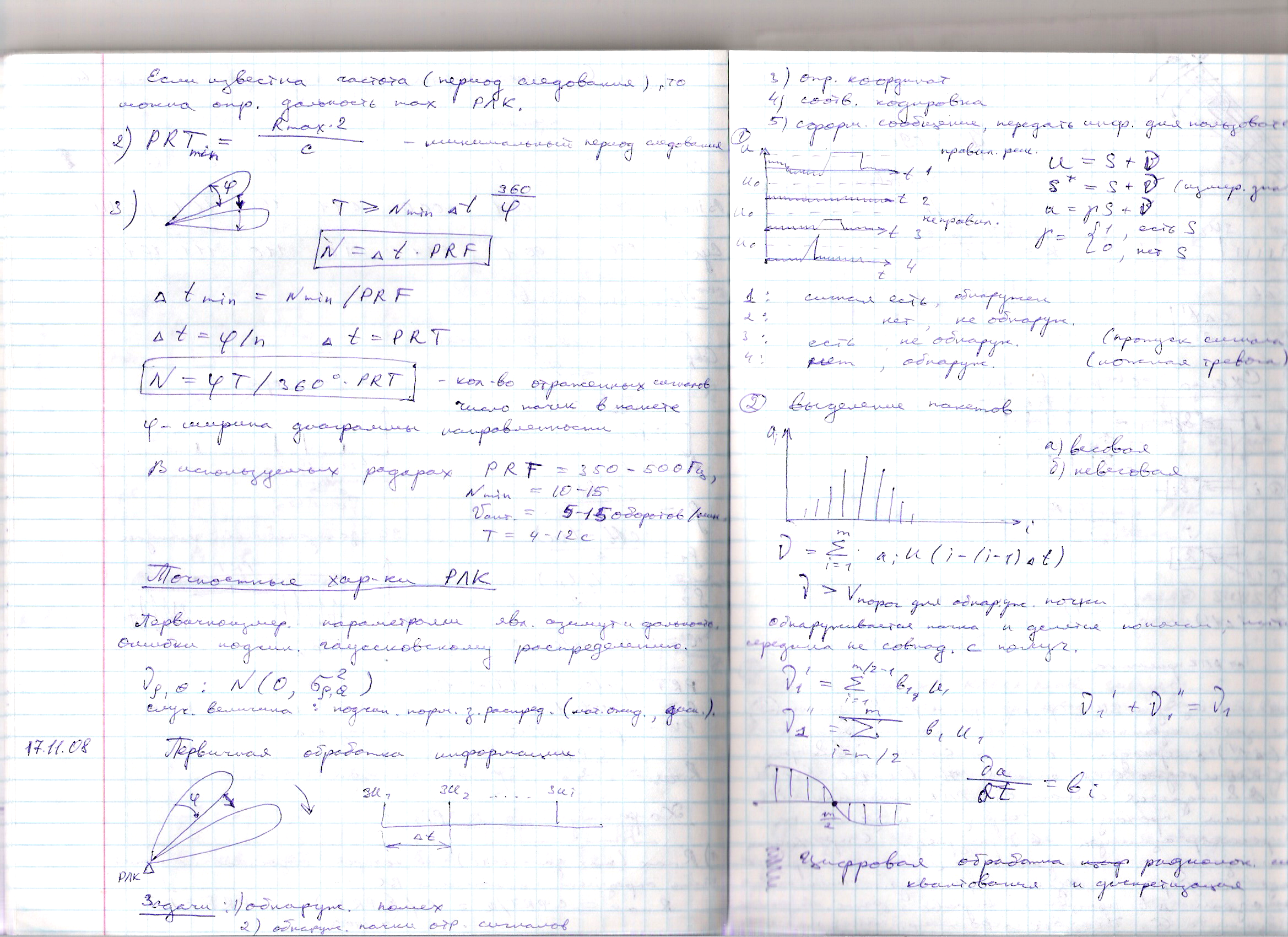
15. Дискретизация и квантование при первичной обработке рли.
При аналоговой обработке сигналов происходит процесс "свертывания", это происходит за счет использования радиолокационной развертки. (Подается опрный sin & cos? изображается круг), пилообразное напряжение заставляет двигаться луч от центра к краю. В процессе посылки запускающего сигнала и одновременного вращения антенны, зона обнаружения разбивается на элементарные участки по азимуту и по дальности
13. Первичная обработка и задачи обнаружения сигнала.
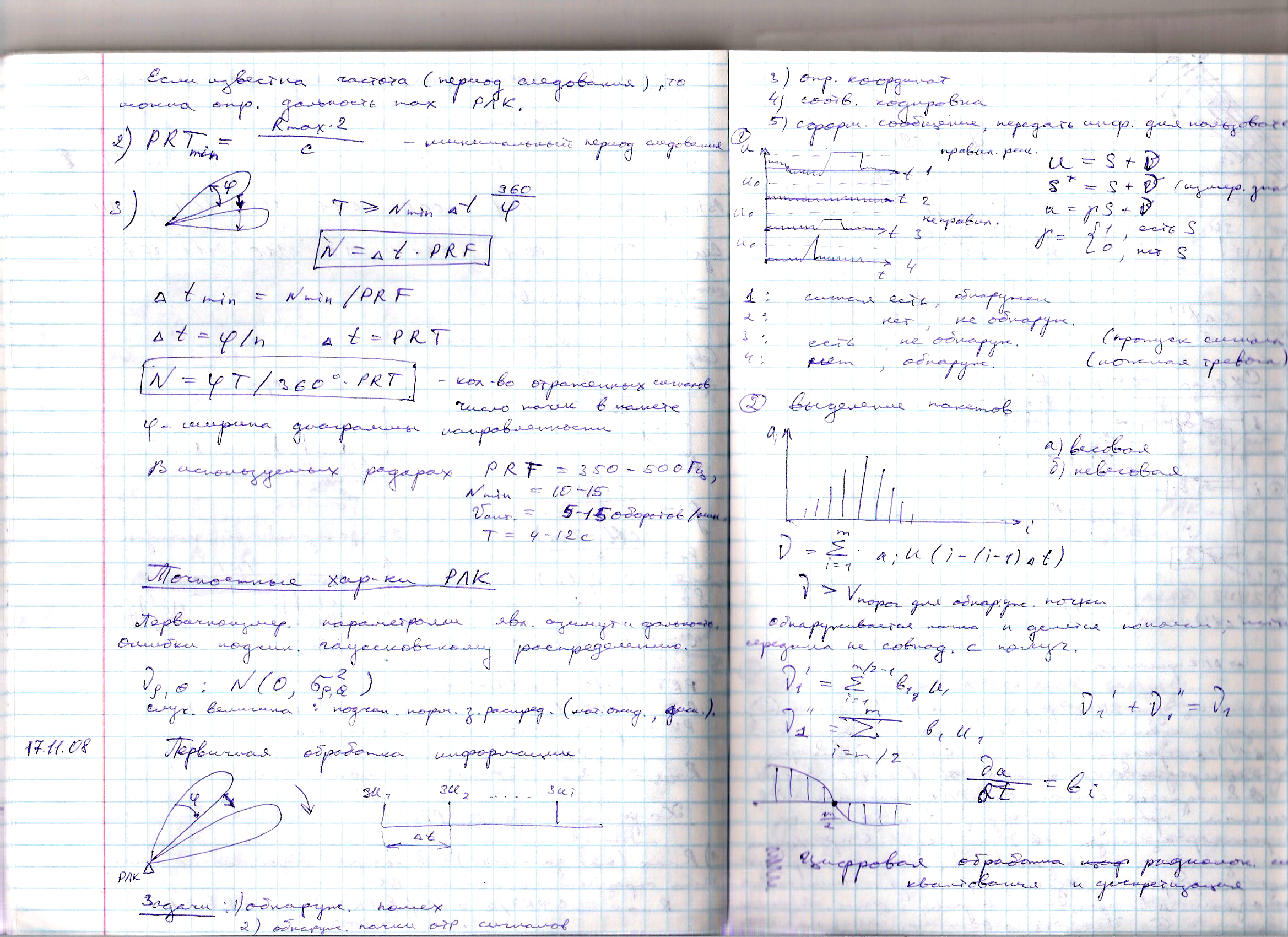
Задачи:
-
обнаружение отраженных сигналов ВС;
-
определение координат обнаруженных ВС;
-
кодирование координат обнаруженных ВС;
-
выделение дополнительной информации, поступающей по вторичному каналу;
-
формирование кодограмм сообщений для передачи пользователям.
10. Первичная обработка рлс. Принцип определения дальности и азимута.
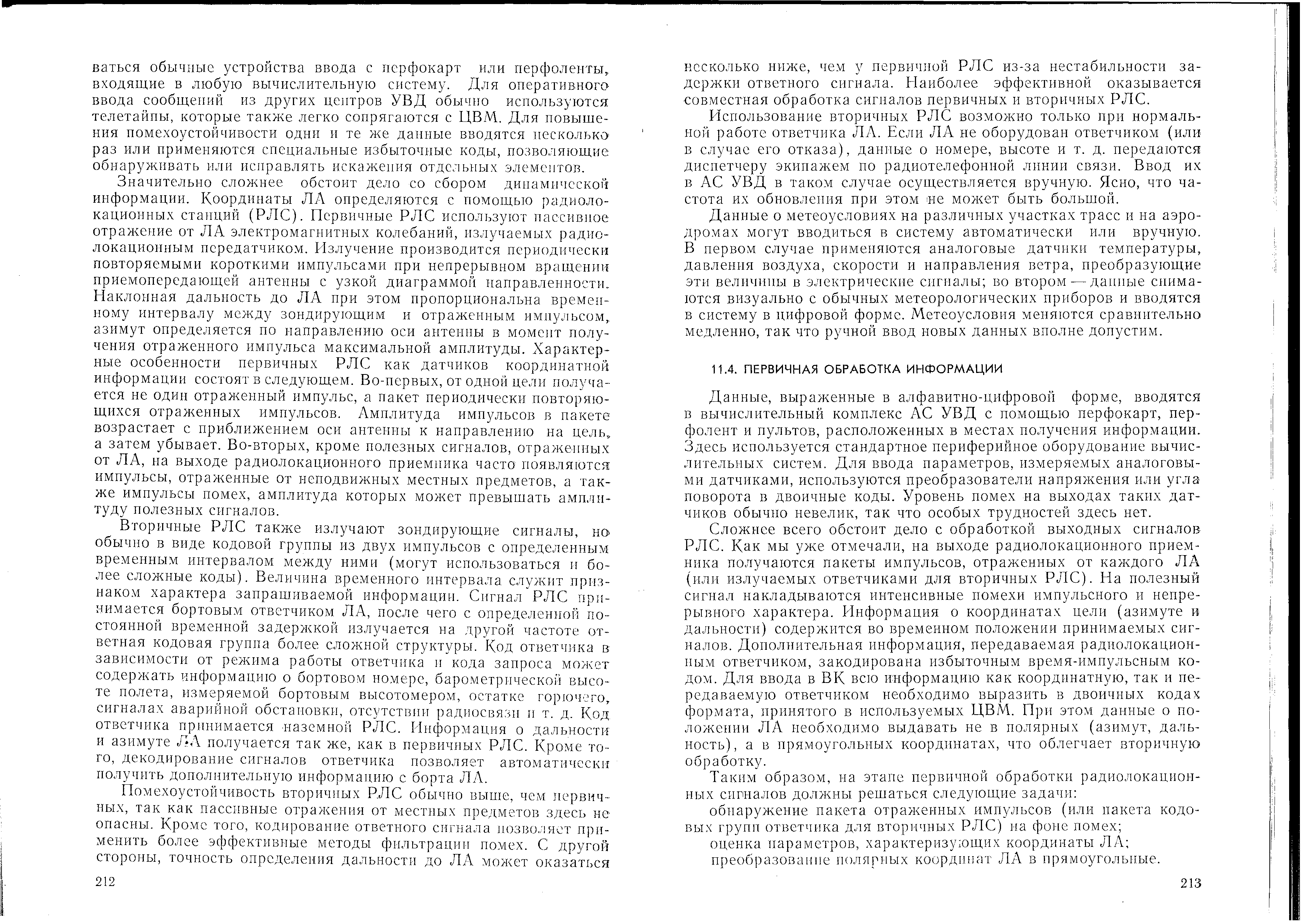
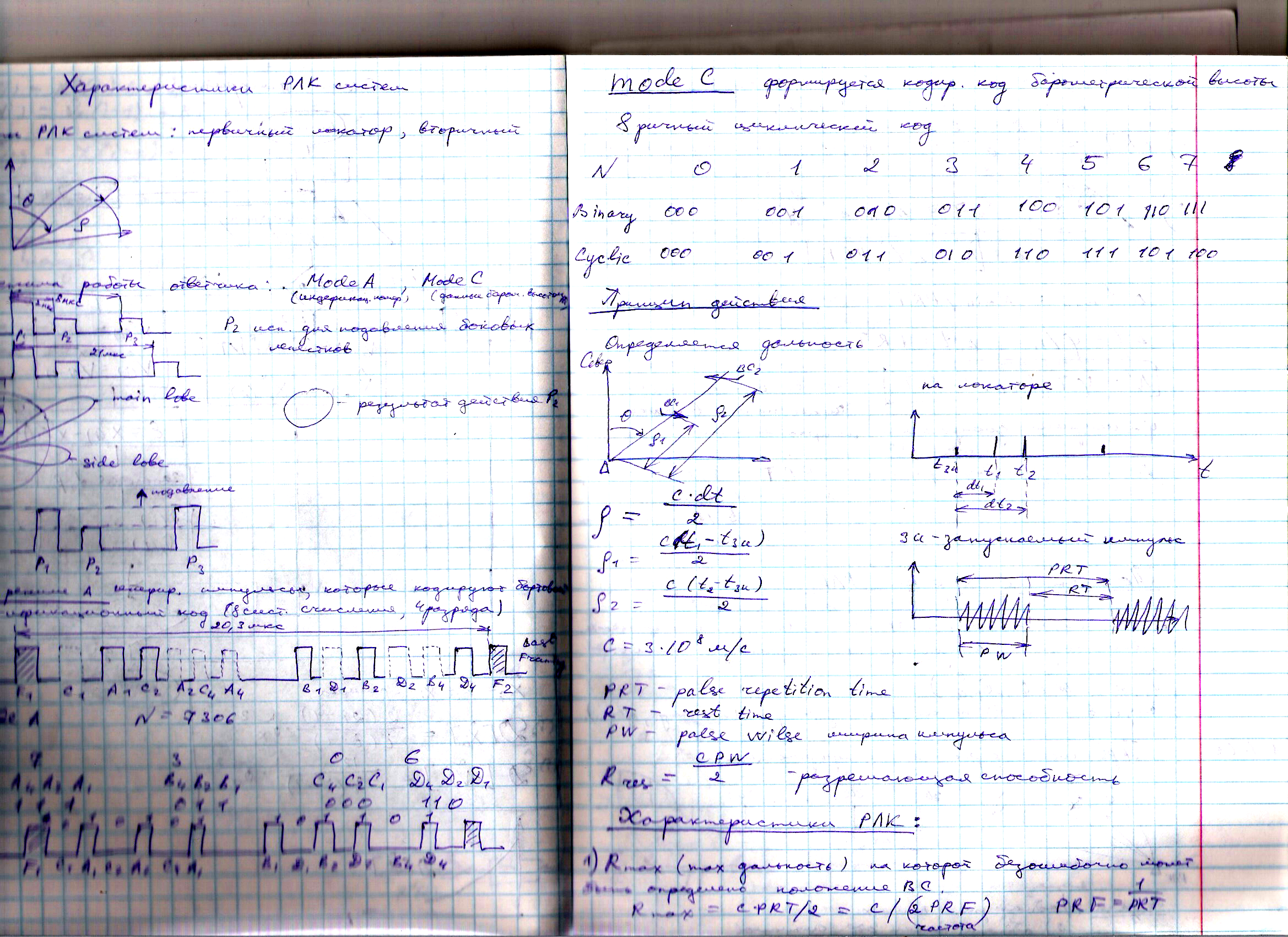
11. Первичная обработка рлс. Число импульсов в пачке отраженных сигналов. Минимальный период следования зи.
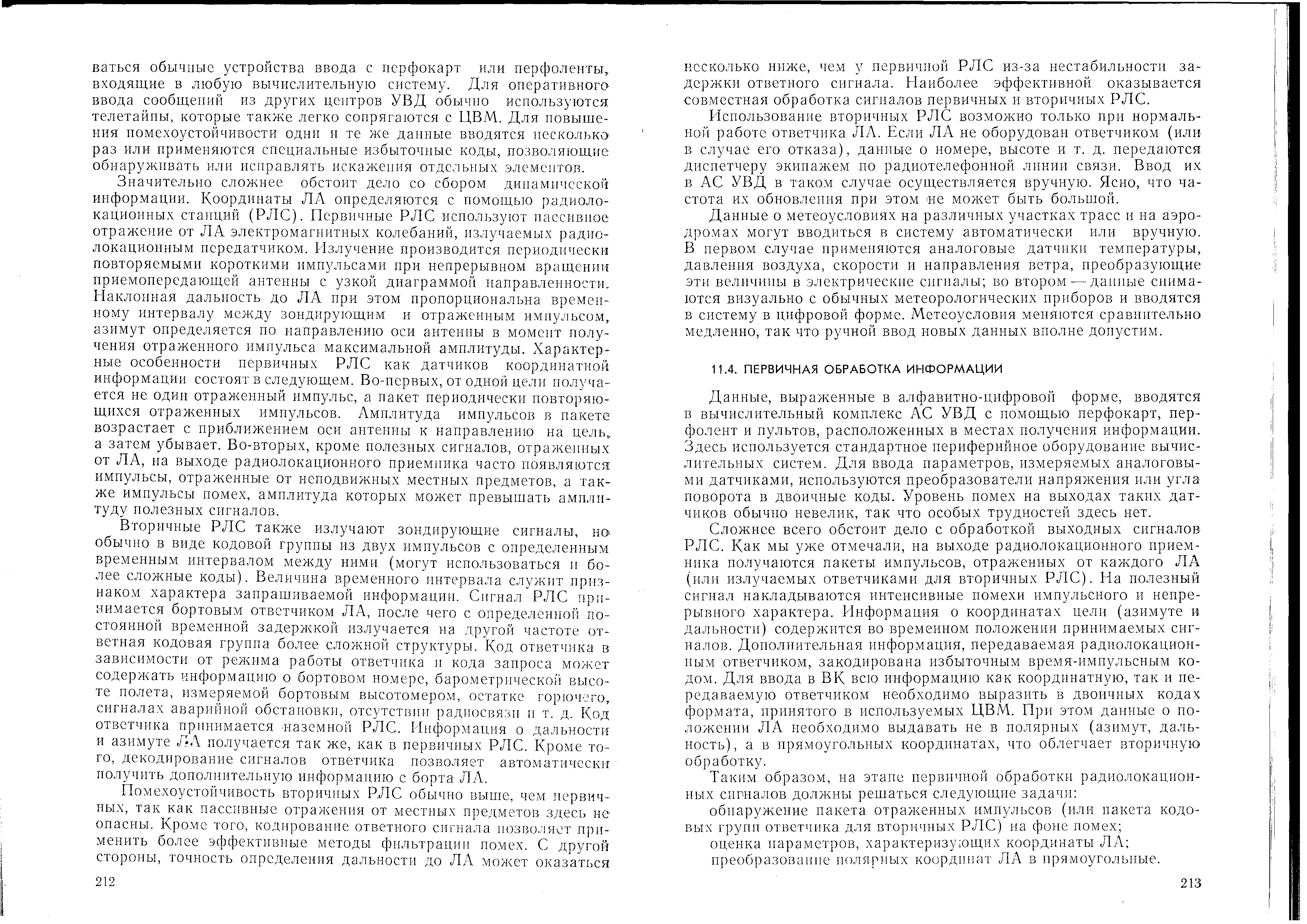
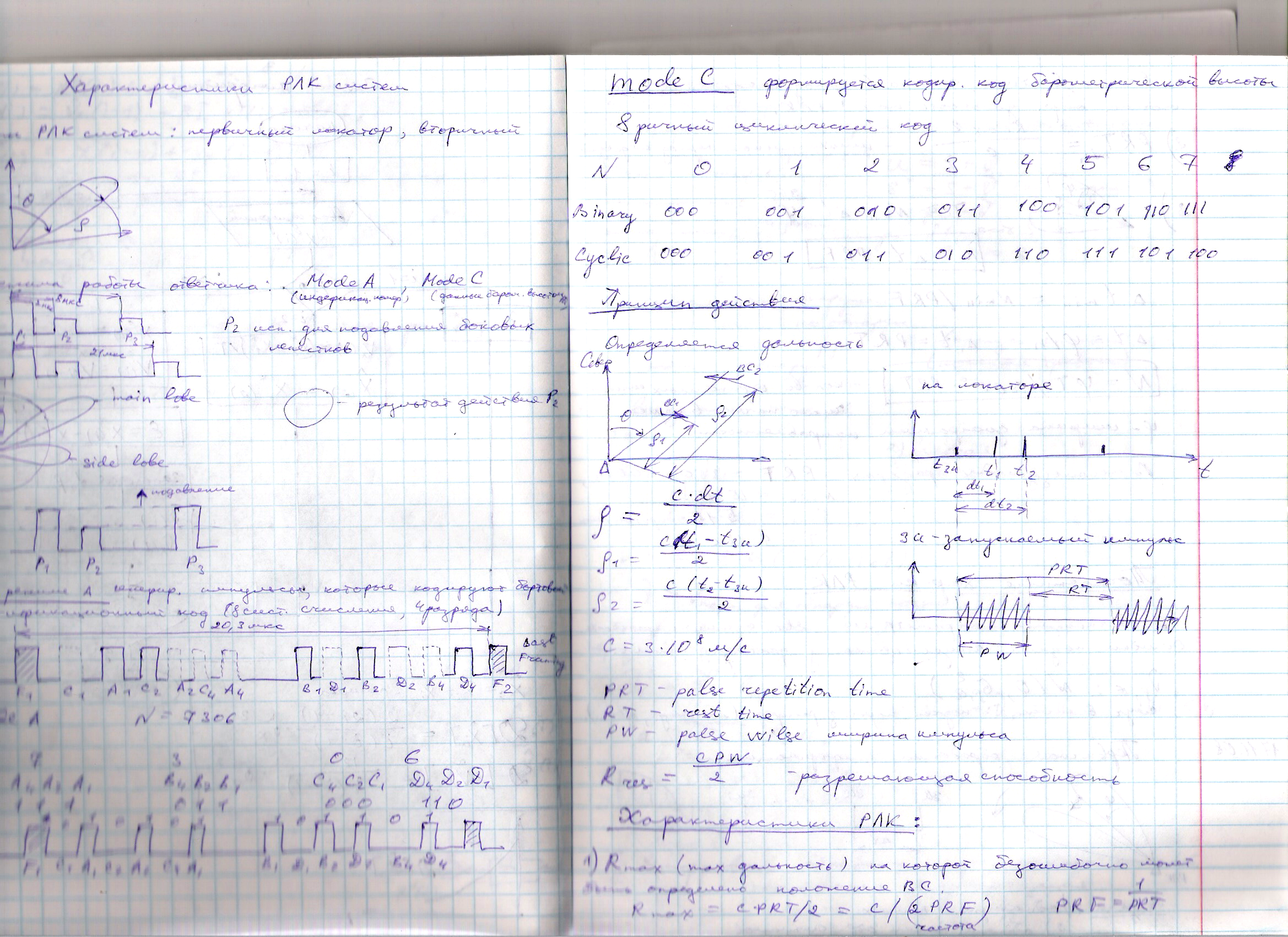
Характеристики РЛК:
1) Rmax- максимальная дальность на которой безошибочно определяется положение ВС
Rmax=c*PRT/2=c/2PRF PRF=1/PRT – частота
Если известна частота(период следования), то можно Rmax РЛК. Чем больше частота, тем меньше дальность надежность РЛК.
6.Статистические характеристики ошибок измерений рлс в прямоугольной системе координат
Для нахождения статистических характеристик ошибок пересчитанных в прямоугольную систему координат измерений РЛС можно воспользоваться обычным приемом линеаризации, в результате которого получим выражение
![]()
где x* , y* - пересчитанные в прямоугольную систему координат измерения дальности и азимута; x , y - соответствующие случайные ошибки определения прямоугольных координат.




y* Измерение



y * y






*
Рисунок 1
x



x* x
РЛС
Решим эту задачу для координаты x . Запишем связь координаты с измеренными значениями дальности и азимута
![]()
Произведем
линеаризацию этого выражения путем
разложения функции
![]() в ряд Тейлора относительно истинных
значений
,
, отбрасывая члены ряда выше первого
порядка
в ряд Тейлора относительно истинных
значений
,
, отбрасывая члены ряда выше первого
порядка
![]()
Отсюда ошибка определения координаты x равна
![]()
Определим дисперсию этой ошибки
![]()
Применим операцию
математического ожидания к каждому
слагаемому, при этом учтем, что поскольку
ошибки измерения дальности и азимута
независимы, то
![]() В результате получим
В результате получим
![]()
Аналогично для координаты y :
![]()
Обращает внимание тот факт, что дисперсия ошибок определения прямоугольных координат зависит от положения ВС (значений , ), в то время как дисперсии ошибок измерений дальности и угла не изменяются.