

Так как главный определитель и определители первого и второго порядка положительные, то можно сделать вывод, что система устойчива.
-
Построение переходного процесса и определение показателей качества системы
Спроектированная
САР должна быть не только устойчивой,
но и
обладать
определенными показателями качества.
О качестве системы
судят по виду переходного процесса,
возникающего
в системе при отработке единичного
возмущающего воздействия. Чем меньше
перерегулирование
![]() ,
время переходного tпер,
количество
колебаний и выше точность, тем выше
качество
системы.
,
время переходного tпер,
количество
колебаний и выше точность, тем выше
качество
системы.
Перерегулирование
![]() определяется
отношением максимального
выброса
хмах-
хуст
регулируемой величины к ее установившемуся
значению хуст
в процентах.
определяется
отношением максимального
выброса
хмах-
хуст
регулируемой величины к ее установившемуся
значению хуст
в процентах.
В реальных системах перерегулирование не превышает 10-50%.
Время переходного процесса tпер характеризует быстроту затухания колебаний и отсчитывается от момента подачи возмущения до момента, когда регулируемая координата станет равной допустимому значению, составляющему 5 % установившегося значения.
Достоинствами способа оценки показателей качества по переходному процессу являются наглядность и точность.
Сделав обратное преобразование по Лапласу передаточной функции замкнутой системы, построим переходный процесс (рисунок 4).
САР имеет следующие показатели качества:
![]() =10%
=10%
tпер=1,8 с
Оценивая переходный процесс системы, делаем выводы, что показатели качества системы регулирования удовлетворяют требованиям технического задания.
-
Построение и анализ лачх и лфчх неизменяемой части
Отстранимся от цифровой части ЛСУ, для этого найдем Тmin в передаточных функциях звеньев.
![]()
Находим частоту самого быстродействующего звена
![]()
Микропроцессор выбирается из условия, что частота коммутации микропроцессора как минимум в 10 раз больше, чем fmax самого быстродействующего звена. Находим необходимую частоту микропроцессора
![]()
В нашем случае это условие выполняется, так как fМК =10 МГц, то есть микропроцессор не оказывает влияния на работу ЛСУ.
Для определения параметров спроектированной системы построим логарифмическую амплитудно-частотную характеристику неизменяемой части, используя передаточную функцию разомкнутой системы. Для расчетов будем использовать математический редактор «Mathcad Professional».
![]()
![]()
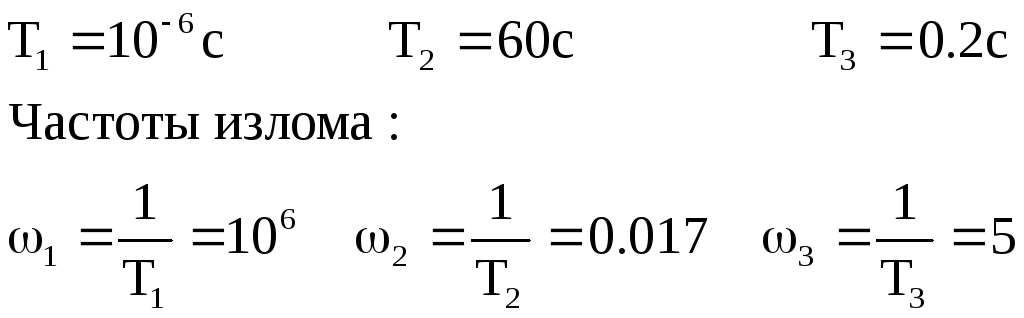
По коэффициенту усиления находим амплитуду и проводим через нее асимптоту с наклоном 0 дб/дек (рисунок 5).
![]()
На частоте сопряжения 2 наклон ЛАЧХ меняется на –20дб/дек.

На частоте сопряжения 3 наклон меняется на –20дб/дек , ЛАЧХ будет иметь наклон –40 дб/дек.

На частоте сопряжения 1 наклон меняется на –20дб/дек , ЛАЧХ будет иметь наклон –60 дб/дек.



Для определения запасов устойчивости по фазе и амплитуде строим ЛФЧХ (рисунок 5).

Запас устойчивости
по фазе
![]() определяется
превышением ЛФЧХ над прямой -180о:
определяется
превышением ЛФЧХ над прямой -180о:
![]()
Исходя из графика, можно сделать вывод, что запас устойчивости по амплитуде m бесконечно большой, так как ЛФЧХ не пересекается с прямой
-180о, то есть система устойчива.
ЗАКЛЮЧЕНИЕ
Разработанная
система автоматического управления
регулированием температуры двухэлементной
нагревательной электроплиты отвечает
всем требованиям, указанным в техническом
задании и доказано, что система устойчива.
Для нее построены логарифмические
амплитудно-частотная и фазовая частотная
характеристики неизменяемой части.
Запас устойчивости системы по фазе
составляет
![]() =70о,
а запас устойчивости по амплитуде m
бесконечно большой.
=70о,
а запас устойчивости по амплитуде m
бесконечно большой.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. Бесекерский В.А. Руководство по проектированию систем автоматического управления. Учебное пособие для вузов. – М.: Высшая школа, 1983.
-
Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования. Учебное пособие для вузов. – М.: Машиностроение, 1989.
-
Якубовский С.В., Ниссельсон Л.И. и др. Цифровые и аналоговые интегральные микросхемы. Справочник. – М.: Радио и связь, 1989.
-
Егоров К.В. Основы теории автоматического регулирования. Учебное пособие для вузов. – М.: Энергия, 1967.
-
Гольдфарб Л.С., Балтрушевич А.В. и др. Теория автоматического управления. – М.: Высшая школа, 1968.
-
Смирнова В.И., Петров Ю.А. и др. Основы проектирования и расчета следящих систем. – М.: Машиностроение, 1983.
-
Головинский О.И. Основы автоматики. – М.: Высшая школа, 1987.