

13.3. Метод трапеций
Этот метод основан на свойствах ВЧХ, следующих из полученной ранее формулы, которые мы рассмотрим без доказательств.
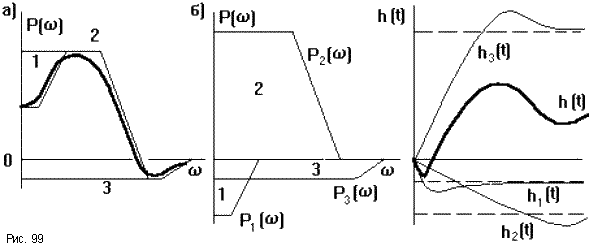
1. Свойство линейности: если ВЧХ
можно представить суммой P(![]() )
= SPi(
)
= SPi(![]() ),
то каждой составляющей Pi(
),
то каждой составляющей Pi(![]() )
будет соответствовать составляющая
переходной характеристики
)
будет соответствовать составляющая
переходной характеристики
 ,
,
при этом h(t) =
![]() (рис.99а).
Поэтому, если ВЧХ имеет сложную форму,
ее можно представить суммой трапециидальных
ВЧХ, примыкающих к вертикальной оси.
Затем все трапеции перерисовывают,
перенося их основания на горизонтальную
ось (рис.99б). Каждой такой трапеции
соответствует своя составляющая
переходной характеристики hi(t),
имеющая апериодический характер
(рис.99в). Р
(рис.99а).
Поэтому, если ВЧХ имеет сложную форму,
ее можно представить суммой трапециидальных
ВЧХ, примыкающих к вертикальной оси.
Затем все трапеции перерисовывают,
перенося их основания на горизонтальную
ось (рис.99б). Каждой такой трапеции
соответствует своя составляющая
переходной характеристики hi(t),
имеющая апериодический характер
(рис.99в). Р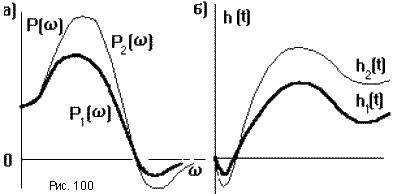 езультирующая
кривая строится суммированием данных
составляющих.
езультирующая
кривая строится суммированием данных
составляющих.
2. Если умножить P(![]() )
на постоянный множитель а, то
соответствующая ей h(t) также умножается
на а. То есть, чем выше ВЧХ, тем выше
и переходная характеристика (рис.100).
)
на постоянный множитель а, то
соответствующая ей h(t) также умножается
на а. То есть, чем выше ВЧХ, тем выше
и переходная характеристика (рис.100).
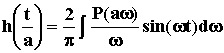
3. Если аргумент w в выражении ВЧХ
P(![]() )
умножить на постоянный множитель а,
то аргумент в h(t) будет делиться на
это число, то есть
)
умножить на постоянный множитель а,
то аргумент в h(t) будет делиться на
это число, то есть
.
Т о
есть переходный процесс в случае P(a
о
есть переходный процесс в случае P(a![]() )
будет протекать в а раз быстрее, чем
в случае P(
)
будет протекать в а раз быстрее, чем
в случае P(![]() )
(рис.101).
)
(рис.101).
Рассмотрим трапециидальную ВЧХ
(рис.102а). Она характеризуется коэффициентом
наклона k =
![]() 1
1![]() 2.
Под единичной трапецией (рис.102б)
понимают трапецию, две стороны которой
совпадают с осями координат и равны по
1 в соответствующих масштабах; наклон
k может быть различным: P1(
2.
Под единичной трапецией (рис.102б)
понимают трапецию, две стороны которой
совпадают с осями координат и равны по
1 в соответствующих масштабах; наклон
k может быть различным: P1(![]() )
=
)
=
 .
.
П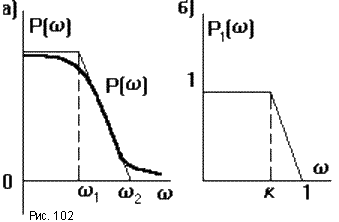 одставляя
это определение в выражение для
определения h(t) можно вычислить
кривую переходного процесса, соответствующую
единичной трапециидальной ВЧХ. Эти
расчеты были проделаны и составлены
таблицы hk
-функций.
одставляя
это определение в выражение для
определения h(t) можно вычислить
кривую переходного процесса, соответствующую
единичной трапециидальной ВЧХ. Эти
расчеты были проделаны и составлены
таблицы hk
-функций.
Для любой трапециидальной ВЧХ, на которые
разбита реальная ВЧХ (рис.99б), можно
построить подобную ей единичную трапецию
со значением k =
![]() 1
1![]() 2,
где
2,
где
![]() 1
- частота, соответствующая перелому
реальной трапеции,
1
- частота, соответствующая перелому
реальной трапеции,
![]() 2
- основание трапеции реальной ВЧХ. Для
данной единичной трапеции по таблице
hk-функций
строят кривую hk(k,t),
где t - время. Затем, используя свойства
2 и 3 масштабирования ВЧХ и переходной
характеристики строят кривую переходного
процесса, соответствующего данной
трапециидальной ВЧХ. Причем оба описанных
процесса можно совместить: сначала
задаются моментом времени t, для
него по таблице находят значение
hk(k,t),
потом умножают это значение на P(0)
(масштабирование по вертикальной оси)
и откладывают полученное значение на
графике h(t) для времени t = t/
2
- основание трапеции реальной ВЧХ. Для
данной единичной трапеции по таблице
hk-функций
строят кривую hk(k,t),
где t - время. Затем, используя свойства
2 и 3 масштабирования ВЧХ и переходной
характеристики строят кривую переходного
процесса, соответствующего данной
трапециидальной ВЧХ. Причем оба описанных
процесса можно совместить: сначала
задаются моментом времени t, для
него по таблице находят значение
hk(k,t),
потом умножают это значение на P(0)
(масштабирование по вертикальной оси)
и откладывают полученное значение на
графике h(t) для времени t = t/![]() 2
(масштабирование по горизонтальной
оси). Строя таким образом точки для
различных моментов времени получают
кривую
2
(масштабирование по горизонтальной
оси). Строя таким образом точки для
различных моментов времени получают
кривую
hi(t/![]() 2)
= P(0)
2)
= P(0)![]() hk(k,t).
hk(k,t).
Данный алгоритм удобно оформить в таблицу:
|
t |
hk(k,t) |
t =
t/ |
hi(t)
= P(0) |
|
..... |
..... |
..... |
..... |
После суммирования составляющих переходного процесса, соответствующих каждой трапеции, получают реальную характеристику h(t).
Описанный метод построения переходной характеристики называется методом трапеций.
Вопросы
-
Какую частотную характеристику используют для оценки качества управления САУ?
-
Какому значению на переходной характеристике соответствует точка ВЧХ при
 =
0?
=
0?
-
Какую форму имеет кривая переходного процесса САУ с вогнутой ВЧХ?
-
Какую форму имеет кривая переходного процесса САУ с трапециидальной ВЧХ?
-
Какую форму имеет кривая переходного процесса САУ с ВЧХ, имеющей экстремум?
-
Как оценить время переходного процесса по виду ВЧХ?
-
В чем состоит метод трапеций?
-
Как используется в методе трапеций свойство линейности?
-
Как изменится кривая переходного процесса, если ВЧХ растянуть вдоль вертикальной оси?
-
Как изменится кривая переходного процесса, если ВЧХ растянуть вдоль горизонтальной оси?
-
Что называется единичной трапецией?
-
Сформулируйте алгоритм построения переходной характеристики в методе трапеций?