

2.2. Метод определения минимально-безопасного расстояния (дистанции) между автомобилями
Введем некоторые определения, которые потребуются в дальнейшем.
Определение
1. Будем
говорить, что столкновение автомобилей
![]() и
и
![]() на отрезке времени
на отрезке времени
![]() не произойдет, а отрезок времени
не произойдет, а отрезок времени
![]() будем называть безопасным (в смысле
невозможности столкновения), если для
любого
будем называть безопасным (в смысле
невозможности столкновения), если для
любого
![]() из этого отрезка выполняется неравенство
(2.1.15).
из этого отрезка выполняется неравенство
(2.1.15).
Определение
2. Момент
времени
![]() будем называть моментом касания
автомобилей
будем называть моментом касания
автомобилей
![]() и
и
![]() на отрезке
времени
на отрезке
времени
![]() ,
если
,
если
![]() и выполняется равенство
и выполняется равенство
![]() .
.
Определение
3. Момент
касания
![]() будем называть опасным моментом касания,
или моментом столкновения автомобилей
будем называть опасным моментом касания,
или моментом столкновения автомобилей
![]() и
и
![]() на отрезке времени
на отрезке времени
![]() ,
если выполняется условия:
,
если выполняется условия:
![]() :
:
1)
![]() при
при
![]()
2)![]() ;
(2.2.1)
;
(2.2.1)
3)![]() при
при
![]() .
.
Механический смысл
неравенства (2.2.1) состоит в том, что
после момента касания начинает происходить
деформация элементов кузова автомобилей,
поэтому расстояние между центрами масс
автомобилей
![]() и
и
![]() начинает уменьшаться.
начинает уменьшаться.
Определение
4. Момент
касания
![]() будем
называть безопасным моментом касания
автомобилей
будем
называть безопасным моментом касания
автомобилей
![]() и
и
![]() на отрезке времени
на отрезке времени
![]() ,
если выполняются условия:
,
если выполняются условия:
![]() :
:
1)
![]() при
при
![]()
2)![]() ;
(2.2.2)
;
(2.2.2)
3)![]() при
при
![]() .
.
Механический смысл
этого определения состоит в том, что
автомобиль
![]() ,
догнав и коснувшись передней кромкой
переднего бампера задней кромки заднего
бампера автомобиля
,
догнав и коснувшись передней кромкой
переднего бампера задней кромки заднего
бампера автомобиля
![]() в момент времени
в момент времени
![]() ,
или начнет двигаться с той же скоростью,
что и автомобиль
,
или начнет двигаться с той же скоростью,
что и автомобиль
![]() ,
или начнет отставать от автомобиля
,
или начнет отставать от автомобиля
![]() .
.
Отметим, что условия
(2.2.2) совпадают с необходимым условием
минимума функции
![]() на отрезке времени
на отрезке времени
![]() в момент времени
в момент времени
![]() =
=![]() .
.
Определение
5.
Выбранное начальное расстояние
![]() будем называть безопасным на отрезке
времени
будем называть безопасным на отрезке
времени
![]() для автомобилей
для автомобилей
![]() и
и
![]() ,
если неравенство (2.1.15) выполняется для
всех моментов времени
,
если неравенство (2.1.15) выполняется для
всех моментов времени
![]() из отрезка
из отрезка
![]() .
.
Безопасное
начальное расстояние
![]() ,
вообще говоря, является функционалом
от параметров движения автомобилей
,
вообще говоря, является функционалом
от параметров движения автомобилей
![]() и
и
![]() ,
т. е. зависит от ускорений автомобилей
,
т. е. зависит от ускорений автомобилей
![]()
![]() на отрезке времени
на отрезке времени
![]() ,
начальных скоростей
,
начальных скоростей
![]() и
и
![]() ,
технического состояния, дорожных условий
и т.д. Следует отметить, что если для
заданного движения автомобилей мы нашли
некоторое безопасное расстояние
,
технического состояния, дорожных условий
и т.д. Следует отметить, что если для
заданного движения автомобилей мы нашли
некоторое безопасное расстояние
![]() ,
то любое расстояние
,
то любое расстояние
![]() будет
тоже безопасным. Так как множество
безопасных расстояний S0=
будет
тоже безопасным. Так как множество
безопасных расстояний S0=![]() для
рассматриваемых
движений автомобилей
для
рассматриваемых
движений автомобилей
![]() и
и
![]() ограничено
снизу нулем, то существует точная нижняя
граница этого множества
ограничено
снизу нулем, то существует точная нижняя
граница этого множества
![]() =
=![]() S0
S0![]() (2.2.3)
(2.2.3)
такая, что любое
![]() является безопасным начальным расстоянием
для заданных движений автомобилей
является безопасным начальным расстоянием
для заданных движений автомобилей
![]() и
и
![]() ,
а для любого
,
а для любого
![]() автомобили
автомобили
![]() и
и
![]() неизбежно столкнутся.
неизбежно столкнутся.
Определение
6.
Наименьшее значение из множества S0,
определенное
равенством (2.2.3), будем называть
минимально-безопасным начальным
расстоянием и обозначать
![]() .
.
Если при движении
автомобилей
![]() и
и
![]() водителю автомобиля
водителю автомобиля
![]() ,
который находился в начальный момент
времени
,
который находился в начальный момент
времени
![]() на расстоянии
на расстоянии
![]() от
автомобиля
от
автомобиля
![]() ,
удается добиться того, что функция
,
удается добиться того, что функция
![]() принимает на отрезке времени
принимает на отрезке времени
![]() неотрицательные значения, т. е. выполняется
неравенство (2.1.15), то в этом случае из
равенства (2.1.13) следует, что
неотрицательные значения, т. е. выполняется
неравенство (2.1.15), то в этом случае из
равенства (2.1.13) следует, что
![]() (2.2.4)
(2.2.4)
на рассматриваемом
отрезке времени. Неравенство (2.2.4)
означает согласно определению 1, что
столкновение автомобилей
![]() и
и
![]() на этом отрезке времени не произойдет.
Если же водителю автомобиля
на этом отрезке времени не произойдет.
Если же водителю автомобиля
![]() не удается добиться (вплоть до применения
экстренного торможения) выполнения
неравенства (2.2.4) в любой момент времени
на отрезке
не удается добиться (вплоть до применения
экстренного торможения) выполнения
неравенства (2.2.4) в любой момент времени
на отрезке
![]() ,
то столкновение автомобилей
,
то столкновение автомобилей
![]() и
и
![]() необходимо
произойдет. Это означает, что он
неправильно выбрал начальное расстояние
необходимо
произойдет. Это означает, что он
неправильно выбрал начальное расстояние
![]() в начальный момент времени
в начальный момент времени
![]()
Утверждение
1. Если
при движении автомобилей
![]() и
и
![]() функция
функция
![]() принимает неотрицательные значения на
отрезке времени
принимает неотрицательные значения на
отрезке времени
![]() ,
то столкновение автомобилей
,
то столкновение автомобилей
![]() и
и
![]() на этом отрезке времени не произойдет,
а начальное безопасное расстояние
на этом отрезке времени не произойдет,
а начальное безопасное расстояние
![]() может
быть любым неотрицательным числом, т.
е. минимально-безопасное расстояние
может
быть любым неотрицательным числом, т.
е. минимально-безопасное расстояние
![]() .
.
Доказательство.
Действительно, так как
![]() для
для
![]()
![]() ,
то в силу равенства (2.1.13) функция
,
то в силу равенства (2.1.13) функция
![]() и, следовательно, согласно определению
1 столкновение автомобилей
и, следовательно, согласно определению
1 столкновение автомобилей
![]() и
и![]() не произойдет.
не произойдет.
В этом случае
начальное расстояние между автомобилями
может быть любым
![]() ,
следовательно,
,
следовательно,
![]() .
.
Пусть движение
автомобилей
![]() и
и
![]() таково, что функция
таково, что функция
![]() принимает на отрезке времени
принимает на отрезке времени
![]() как неотрицательные, так и отрицательные
значения.
как неотрицательные, так и отрицательные
значения.
Утверждение
2. Если
функция
![]() принимает на отрезке времени
принимает на отрезке времени
![]() как отрицательные, так и неотрицательные
значения, то минимально-безопасное
расстояние для этого отрезка времени
определяется равенством
как отрицательные, так и неотрицательные
значения, то минимально-безопасное
расстояние для этого отрезка времени
определяется равенством
![]()
![]()
![]() (2.2.5)
(2.2.5)
Доказательство:
Так как функция
![]() ,
определенная равенством (2.1.14), непрерывна
и дифференцируема на отрезке времени
,
определенная равенством (2.1.14), непрерывна
и дифференцируема на отрезке времени
![]() ,
то она необходимо ограничена и достигает
своей точной нижней границы при некотором
значении
,
то она необходимо ограничена и достигает
своей точной нижней границы при некотором
значении
![]() ,
т. е.
,
т. е.
![]() ,
(2.2.6)
,
(2.2.6)
так как функция
принимает и отрицательные значения на
рассматриваемом отрезке. Покажем, что
величина
![]() является минимально-безопасным начальным
расстоянием на отрезке
является минимально-безопасным начальным
расстоянием на отрезке
![]() .
Подставляя в равенстве (3.1.13) вместо
.
Подставляя в равенстве (3.1.13) вместо
![]() значение
функции
значение
функции
![]() ,
получим
,
получим
![]()
для
![]() ,
так как из определения точной нижней
границы следует
,
так как из определения точной нижней
границы следует
![]() для
для
![]() .
.
Таким образом,
получили, что начальное расстояние
![]() является безопасным. Покажем, что оно
является минимально-безопасным начальным
расстоянием для отрезка времени
является безопасным. Покажем, что оно
является минимально-безопасным начальным
расстоянием для отрезка времени
![]() .
.
Допустим противное.
Пусть существует безопасное
![]() :
:
![]() <
<![]() и
и
![]() (2.2.7)
(2.2.7)
для![]() .
Возьмем произвольное число
.
Возьмем произвольное число
![]() ,
удовлетворяющее неравенству
,
удовлетворяющее неравенству
![]()
или
![]() .
.
Из равенства
(2.2.6) и свойств точной нижней границы
для выбранного
![]() >0
найдется
>0
найдется
![]() ,
,
но тогда
![]() <
<![]() <
<![]() ,
,
т.е.
![]() ,
что противоречит нашему предположению
о том, что
,
что противоречит нашему предположению
о том, что
![]() является
безопасным расстоянием, т.е. неравенству
(2.2.7). Полученное противоречие и доказывает
наше утверждение.
является
безопасным расстоянием, т.е. неравенству
(2.2.7). Полученное противоречие и доказывает
наше утверждение.
Доказанные
утверждения дают практический метод
нахождения минимально-безопасного
начального расстояния между автомобилями
![]() и
и
![]() для заданного отрезка времени.
для заданного отрезка времени.
При экстренном
торможении автомобиля
![]() для нахождения минимально-безопасного
расстояния
для нахождения минимально-безопасного
расстояния
![]() в качестве отрезка времени
в качестве отрезка времени
![]() необходимо рассматривать отрезок
времени
необходимо рассматривать отрезок
времени
![]() ,
где
,
где
![]()
![]() время движения автомобиля
время движения автомобиля
![]() до полной остановки.
до полной остановки.
Таким образом,
для нахождения минимально-безопасного
расстояния
![]() в случае, если функция
в случае, если функция
![]() может принимать на отрезке времени
может принимать на отрезке времени
![]() как положительные, так и отрицательные
значения, необходимо:
как положительные, так и отрицательные
значения, необходимо:
1) найти все моменты
времени
![]() подозрительные на экстремум, т.е. точки,
в которых выполняется равенство
подозрительные на экстремум, т.е. точки,
в которых выполняется равенство
![]() ;
;
-
найти все точки
 (безопасные моменты касания), в которых
функция
(безопасные моменты касания), в которых
функция
 достигает отрицательного минимума,
тогда минимально-безопасное расстояние
определяется равенством
достигает отрицательного минимума,
тогда минимально-безопасное расстояние
определяется равенством
![]() ,
,
если
![]() ,
и
,
и
![]() ,
,
если
![]() .
.
Если функция
![]() принимает только положительные значения,
т.е.
принимает только положительные значения,
т.е.
![]() для всех
для всех
![]() ,
то в этом случае
,
то в этом случае
![]() .
.
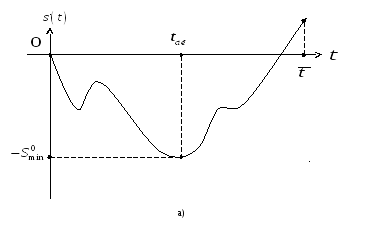
Геометрический
смысл нахождения минимально-безопасного
расстояния состоит в нахождении
положительной величины
![]() (рис.2.2.1, а), б)), на
(рис.2.2.1, а), б)), на
которую необходимо
сдвинуть график функции
![]() вдоль оси
вдоль оси
![]() вверх, чтобы график функции
вверх, чтобы график функции
![]() только касался оси
только касался оси
![]() и полностью лежал бы в первом
и полностью лежал бы в первом
квадранте системы
координат
![]() при
при
![]() .
.
Метод, основанный на доказанных утверждениях, позволяет в дальнейшем находить минимально-безопасное расстояние между автомобилями, дви-
![]()


![]()


0
![]()



![]()
Рис.2.2.1
жущимися в попутном
направлении, при любом техническом
состоянии автомобилей
![]() ,
,![]() и любых дорожных условиях.
и любых дорожных условиях.