

1.3. Елементи авіаційних автоматичних пристроїв
Датчики сигналів. Датчики призначені для виміру контрольованої величини і її перетворення до виду, зручному для передачі в підсилювальні або індикаторні пристрої. Найчастіше в датчику вимірювана величина перетвориться в електричний сигнал.
Для перетворення механічних переміщень в електричний сигнал застосовують потенціометричні, індуктивні, ємнісні й інші датчики.
Потенціометричний
датчик
має нерухому частину у вигляді тонкого
проводу, намотаного на каркас. По проводу
переміщується контактний повзунок.
До кінців проводу приєднується постійна
або змінна напруга джерела живлення.
Вхідним сигналом датчика є переміщення
повзунка, а вихідним - напруга між
повзунком й одним з кінців проводу
(рис. 1.5,а).
Опір R![]() навантаження
повинне бути в багато разів більше
опору проводу
датчика,
у цьому випадку воно практично не шунтує
датчик.
При рівномірному намотуванні вихідна
напруга пропорційна довжині проводу,
розташованого між його початком і
движком, і, отже, пропорційно переміщенню
движка
навантаження
повинне бути в багато разів більше
опору проводу
датчика,
у цьому випадку воно практично не шунтує
датчик.
При рівномірному намотуванні вихідна
напруга пропорційна довжині проводу,
розташованого між його початком і
движком, і, отже, пропорційно переміщенню
движка
Uвих = Ех/l
де l — довжина намотування дроту. У розглянутій схемі знак або фаза вихідної напруги не змінюється з переміщенням повзунка. Такі датчики називаються нереверсивними. У системах керування частіше застосовують реверсивні датчики (рис. 1.5, б), знак або фаза вихідної напруги яких змінюються при зміні напрямку повзунка від середньої точки. Основний недолік потенціометричних датчиків - наявність рухливих контактів. У процесі експлуатації відбувається відставання контактів, що рухаються, перетирання проводу, окислювання контактної доріжки.
Більш високу надійність і чутливість мають індуктивні датчики.

Рис 1.6. Схема індуктивного датчика
Індуктивний датчик (рис. 1.6) реверсивного типу має два нерухомих магнітодроти, на які намотані дротові котушки, і рухливий якір, виконаний з феромагнітного матеріалу. Розміри повітряних зазорів між якорем і магнітодротами δ1 й δ 2 визначають індуктивності котушок L1 і L2. Індуктивність обернено пропорційна довжині повітряного зазору. Коли якір перебуває посерединi між магнітодротами, δ1 = δ 2 і L1 = L2. При переміщенні якоря на величину х довжина одного зазору збільшується, а іншого — зменшується. Відповідно змінюються індуктивності L1 і L2котушок, включених у схему моста. Іншими двома плечима моста є котушки індуктивності L3 і L4. До однієї діагоналі моста проводиться змінна напруга джерела живлення Uв, а з іншої діагоналі знімається вихідна напруга Uвих. Переміщення якоря викликає розбаланс моста і вихідна напруга моста пропорційна переміщенню якоря.
Основний недолік індуктивного датчика — велике навантаження. Діюча на якір з боку магнітодрота.
Мале навантаження має ємкісний датчик. У такому датчику є дві нерухомі пластини 1 і 2 (рис. 1.7) напівкруглої форми. Рухлива пластина 3, теж напівкруглі форми може повертатися на кут φ відносно середнього положення, при якому пластина 3 однаково перекривається із пластинами 1 й 2. При такому повороті ємкості між рухливою пластиною й нерухомими змінюються: одна зростає, а інша зменшується відповідно до формули

де ε - коефіцієнт діелектричної проникності; S - площа перекриття пластин; φ - коефіцієнт пропорційності; d - відстань
між пластинами.
Змінні ємності включають у схему моста, вихідна напруга якого збільшується зі збільшенням кута φ, фаза вихідної напруги залежить від напрямку повороту рухливої пластини щодо середнього положення. Основний недолік ємкісного датчика - мала потужність вихідного сигналу.

Рис 1.7. Пластини ємкісного датчика: 1, 2 - нерухомі; 3-рухлива
Підсилювачі. Підсилювачі автоматичних систем призначені для посилення потужності сигналу, переданого від датчиків до виконавчих пристроїв. Основною характеристикою підсилювача є коефіцієнт підсилення потужності, дорівнює відношенню вихідної потужності до вхідного. В автоматичних системах застосовують підсилювачі з більшими коефіцієнтами підсилення потужності, що досягають 10-8-10-10.

Рис 1.8 Схема транзисторного підсилювача
З метою зменшення розмірів, маси й інерційності багатокаскадні підсилювачі збирають із різнотипних каскадів. Вхідні малопотужні каскади виконують на напівпровідникових підсилювачах, які мають великий вхідний опір, малу масу й габарити. Низькі коефіцієнти корисної дії напівпровідникового підсилювача мало впливають на загальні втрати, тому що вхідні каскади споживають малу потужність. Вихідні каскади виконують на релейних або магнітних підсилювачах, що мають малий вихідний опір, високий коефіцієнт корисної дії й більшу стабільність характеристик. Така будова багатокаскадних підсилювачів забезпечує узгодження характеристик підсилювача з характеристиками датчика виконавчого пристрою. Найпоширенішою схемою транзисторного підсилювача із загальним емітером (рис. 1.8), у якій посилюваний вхідний сигнал змінного току Uвх подається через розділовий конденсатор C1 на базу транзистора V і створює вхідний базовий струм
Iб = Uвх / Н11Е
де Н11е — вхідний опір транзистора в схемі із загальним емітером.
Струм Колектора I до транзистора V перевищує струм бази Iб в Н11е раз, де
Н11е — коефіцієнт передачі струму транзистора в схемі із загальним емітером. Основна частина струму колектора через розділовий конденсатор C2
пoдається в навантаження Rн, так що коефіцієнт підсилення струму ki у підсилювачі близький до величини Н11е, а коефіцієнт підсилення напруги ki підсилювача = 102 - 104.
Коефіцієнт підсилення потужності одного каскаду транзисторного підсилювача, дорівнює добутку коефіцієнтів підсилення струму й напруги, лежить звичайно в діапазоні е 102 - 104. Резистори R1, R2, RЗ у схемі підсилювача використаються для подачі постійної напруги від джерела живлення на базу i колектор транзистора.
Досягненням транзисторних підсилювачів є їх мала інерціонність. Постійна часу транзисторних підсилювачів вимірюється одиницями й десятками наносекунд.
У магнітному підсилювачі вхідний сигнал подається на обмотку управління (ОУ) із числом витків ωу (рис. 1.9). Обмотка управління охоплює сердечники 1 і 2 виготовлені з магнітно-м'якого матеріалу. Кожна з робочих обмоток Р01 і Р02 охоплює один сердечник. Робочі обмотки включаються послідовно з опором навантаження Кн утворюючи робочий ланцюг, в який включається джерело змінного струму з напругою Uп. Якщо вхідний сигнал дорівнює нулю, то сердечники перемагнічуються змінним струмом робочих обмоток, але не досягають насичення. У цьому випадку індуктивний опір робочих обмоток великий, а в ланцюзі навантаження тече невеликий струм холостого ходу. При подачі в обмотку керування струму один із сердечників досягає насичення за певний період змінного струму робочої обмотки.

Рис. 1.9. Схема магнітного підсилювача (1,2 сердечники)
При насиченні сердечника індуктивний опір робочих обмоток падає практично до нуля, а струм у навантаженні збільшується й стає рівним Uп/Rн. Чим більше струм керування, тим більше час насичення сердечника й тим більше амплітуда першої гармоніки струму в робочому ланцюзі.
Коефіцієнт підсилення струму магнітного підсилювача визначається з умови рівності магніторушійних сил обмотки посилення Іу , ωу й робочих обмоток Ір, ωр:
Ki=ip/iy=ωy/ωp
Коефіцієнт підсилення напруги магнітного підсилювача визначається коефіцієнтом підсилення струму й опорами обмотки управління Rу й навантаження RH:
Ku = Uвих/Uвх = IpRн/IyRy = Ki(Rн/Ry)
Коефіцієнт підсилення потужності магнітного підсилювача kр=ki, ki звичайно знаходиться у діапазоні 102 - 103.
Розглянутий магнітний підсилювач відноситься до нереверсивних підсилювачів, у яких фаза вихідної напруги не змінюється зі зміною знака вхідної напруги. Більш широке застосування знаходять реверсивні магнітні підсилювачі, у яких фаза вихідної напруги змінюється зі зміною знака вхідної напруги. Вони утворені шляхом з'єднання двох нереверсивних магнітних підсилювачів.
Перевагами магнітного підсилювача є висока надійність і висока вихідна потужність. До недоліків магнітного підсилювача ставляться велика маса й значна інерційність. Постійна часу Т магнітного підсилювача визначається формулою:
Т=Кр/4f
де f - частота струму в робочому ланцюзі.
Для зменшення інерційності магнітного підсилювача зазвичай обмежують коефіцієнт підсилення потужності й підвищують частоту струму в робочому ланцюзі.
Виконавчі пристрої. Виконавчі пристрої автоматичних систем призначені для механічного переміщення управляючих органів. Найпоширенішими виконавчими пристроями є електричні двигуни постійного або змінного току. При використанні двофазного індукційного двигуна вхідна напруга змінного струму Uвх, подається на його обмотку управління (ОУ, рис. 1.10). На обмотку збудження (ОЗ) подають напругу Uзб. Обмотки управління й збудження створюють обертове магнітне поле, що наводить в алюмінієвому роторі вихрові струми і, взаємодіючи з ними, створює обертаючий момент. Керування частотою обертання двигуна досягається зміною вхідного струму, напруги, а керування напрямком обертання двигуна досягається зміною зрушення фаз між 1/вх й 1/віз із —90 до + 90°.
Основними характеристиками виконавчого пристрою є його потужність, коефіцієнт підсилення й постійна часу. Коефіцієнт підсилення, дорівнює відношенню частоти обертання до вхідної напруги, характеризує сталі режими роботи двигуна.
Постійна часу характеризує динамічні властивості двигуна на перехідних процесах розгону й гальмування двигуна.
Для зменшення постійної часу ротор індукційного двигуна виконують у вигляді легкого алюмінієвого стаканчика, а момент інерції роторів у двигунів постійного струму зменшують зниженням радіуса ротора.
У системах автоматичного управління польотом літальних апаратів широко застосовуються гідравлічні виконавчі пристрої, розглянуті в розділі 11.

Рис 1.10. Схема двофазного індукційного двигуна.
Розділ перший
ЗАГАЛЬНІ ВІДОМОСТІ
До складу складних систем авіаційного встаткування входять окремі елементи, що є загальними для багатьох приладів й агрегатів. Цими типовими елементами приладів і систем авіаційного встаткування є датчики сигналів, підсилювачі, виконавчі пристрої й дистанційні передачі.
-
ДАТЧИКИ СИГНАЛІВ
Датчиком називають пристрій, що перетворює вимірюваний параметр в електричний сигнал (у підручнику розглядаються тільки електричні датчики). Найбільше часто вимірюваним параметром є механічне переміщення. Всі електричні датчики можна розділити на параметричні й генераторні.
У параметричних датчиках механічне переміщення викликає зміна деяких їхніх параметрів і це визначає зміну сигналу на виході. У цю групу входять потенціометричні, індукційні і ємнісні датчики, що одержали поширення в авіаційному встаткуванні.
Генераторні датчики безпосередньо перетворюють енергію механічного переміщення в електричну. Прикладом такого датчика може служити тахогенератор постійного або змінного струму.
Потенціометричні датчики
Потенціометричні датчики являють собою ізоляційний каркас із намотаним на нього високоомним провідником. Сигнал з датчика знімається за допомогою ковзного контакту (щітки).
По вихідних характеристиках потенціометричні датчики діляться на лінійні, вихідний сигнал яких пропорційний переміщенню щітки, і функціональні, вихідний сигнал яких є нелінійною функцією переміщення щітки. Як лінійні, так і функціональні потенціометричні датчики можуть мати поступальний або кутовий (обертальний) рух щітки.
Необхідну функціональну залежність потенціометричного датчика можна одержати профілюванням каркаса (рис. 1.1, а) або шунтуванням ділянок потенціометра резисторами різних номіналів (рис. 1.1, б).
Залежно від полярності сигналу, що знімає потенціометричний датчик може бути однополярним (рис. 1.2, а) або двухполярним (рис. 1.2, б).
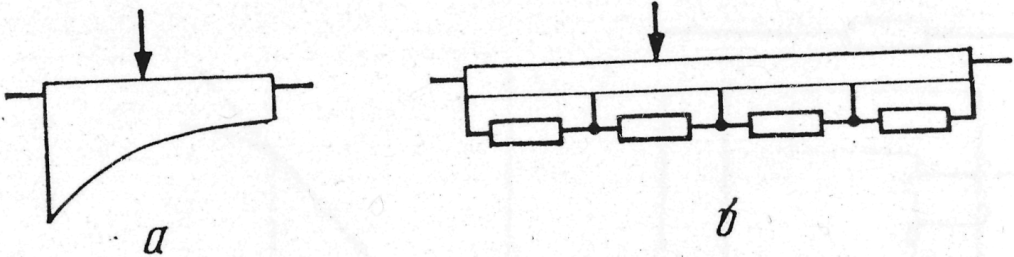
Рис. 1.1. Функціональні потенціометри: а — із профілюванням каркаса; б — із шунтуванням ділянок потенціометра резисторами
Достоїнствами потенціометричних датчиків, що обумовили їхнє широке застосування, є простота конструкції, незначні маса й габарити, можливість роботи на постійному й змінному струмі.

Рис. 1.2. Схеми включення потенціометрів
а - однополярна; б - двухполярна
Основним недоліком потенціометричних датчиків є наявність ковзного контакту. Крім того, вони мають обмежену роздільну здатність (до 0,01 мм) і незначний коефіцієнт підсилення (ДО = 2÷3 В/мм).
Індукційні датчики
Індукційні датчики працюють на принципі зміни індуктивності або взаємоіндуктивності.
Принципова схема індукційного датчика, що працює на принципі зміни індуктивності, показана на рис. 1.3, a, a його характеристика — на рис. 1.3,6. Датчик являє собою котушку індуктивності зі змінним повітряним зазором у сердечнику. Вхідним параметром датчика є величина механічного переміщення якоря — повітряний зазор у магнітопроводі δ, зміна якого приводить до зміни індуктивності котушки, а отже, і величини струму I, що протікає по ній. Таким чином, вихідним параметром датчика є струм I або напруга, що знімає з опору навантаження, включеного послідовно з обмоткою датчика. Звичайно величина повітряного зазору становить частки міліметра й датчик має лінійну вихідну характеристику
![]()
Де К - коефіцієнт підсилення датчика, рівний для розглянутого випадку сотням ампер на міліметр переміщення якоря.

Рис. 1.3. Індуктивний однотактний датчик:
а - пристрій; б - вихідна характеристика
Однак в області більших і малих зазорів δ лінійність ідеальної характеристики датчика (пунктир на рис. 1.3,б) порушується. Це обумовлено тим, що при малих зазорах магнітний опір магнітопроводу обмежується властивостями матеріалу сердечника, а при більших зазорах індуктивний опір обмотки зменшується й стає рівним її активному опором. Реальна характеристика датчика показана на рис. 1.3, б суцільною лінією.
Істотним недоліком найпростішого індукційного датчика є порівняно більша сила притягання якоря до магнітопроводу. Крім того, при зміні повітряного зазору змінюється кут зрушення фази між напругою й струмом у ланцюзі датчика.
Для усунення зазначених недоліків застосовують з'єднання датчиків по диференціальній і мостовій схемах або використають двотактні датчики, що працюють на принципі взаємоіндукції (трансформаторні датчики).
На рис. 1.4,а наведена схема індукційного датчика, статор якого являє собою Ш - образний сердечник, а якір виконаний у вигляді сектора. На середньому стрижні сердечника розміщена первинна обмотка ω1, до якої підводять напругу живлення Uп змінним струмом. Вторинні обмотки ω2 й ωЗ з'єднані послідовно й включені зустрічно. При середньому положенні якоря е.р.с., що наводять у вторинних обмотках, рівні (Е2 = Е3) і вихідна напруга датчика, рівна їхньої різниці, дорівнює нулю (Uвих = E2 - E3 = 0).

Рис. 1.4. Індукційний двотактний датчик:
а — пристрій; б — вихідна характеристика
При повороті якоря в ту або іншу сторону порушується рівність е.р.с. у вторинних обмотках і на виході датчика з'являється сигнал, фаза якого залежить від напрямку, а амплітуда - від кута повороту якоря. Залежність вихідної напруги датчика від кута повороту якоря показана на рис. 1.4,6.
До достоїнств індукційних датчиків варто віднести відсутність ковзних контактів, високу розв'язну здатність (до 10-3 – 10-4 мм); великий коефіцієнт підсилення (до 200 — 300 В/мм).
З недоліків індукційних датчиків можна відзначити недостатньо високу стабільність (розкид характеристик досягає 3 - 5%), можливість роботи тільки на змінному струмі, труднощі балансування при одночасній роботі від декількох датчиків, тому що необхідно вирівнювати сигнали не тільки по амплітуді, але й по фазі.
Ємнісні датчики
Ємнісні датчики працюють на принципі зміни електричної ємності конденсатора, яка в загальному випадку виражається формулою
![]() ,
,
де
![]() - діелектрична проникність;
- діелектрична проникність;
![]() -
електрична постійна;
-
електрична постійна;
![]() -
площа
пластини конденсатора;
-
площа
пластини конденсатора;
![]() -
відстань між пластинами конденсатора.
-
відстань між пластинами конденсатора.

Рис. 1.5. Ємнісний датчик для вимірювання рівня
Аналіз приведеної формули показує, що змінювати ємність конденсатора можна змінюючи площу пластин, відстань між ними і властивості діелектрика, що знаходиться між пластинами. В системах авіаційного обладнання застосовується останній спосіб, який використовується в датчиках рівня палива. Принципова схема такого датчика показана на рис. 1.5. Він являє собою циліндричний конденсатор, який поміщають в паливний бак. Коли бак пустий ємність датчика
 .
.
У випадку заповнення баку паливом до рівня х ємність датчика
 ,
,
де
 - ємність датчика, обумовлена наявністю
в паливному баку.
- ємність датчика, обумовлена наявністю
в паливному баку.

Рис. 1.6. Схема тахогенератора змінного струму
До переваг ємнісних датчиків описаної конструкції відносять відсутність як ковзного контакту, так і взагалі рухомих частин, можливість виготовлення практично будь-якої конфігурації. В якості недоліків можна вказати роботу тільки на змінному струмі і складність балансування схеми при паралельному чи послідовному включенні декількох датчиків.
Тахогенератор змінного струму
Тахогенератор змінного струму, як вже вказувалось, відноситься до датчиків генераторного типу. Його принципова схема показана на рис. 1.6. Конструктивно тахогенератор являє собою електричну машину з порожнистим немагнітним ротором.
До обмотки збудження ОВ підводиться живлення змінним струмом і частотою 400 Гц.
При нерухомому роторі пульсуючий магнітний потік збудження Фв створює в роторі (як і у вторинній обмотці трансформатора) е. р. с., під дією якої тече струм Ітр. В генераторній обмотці ОГ, розміщеної під кутом 90º до обмотки збудження, е. р. с. не створюється. При обертанні ротора з частотою ω р в його обмотці створюється е. р. с. обертання, яка обумовлює протікання струму Івр. Цей струм створює свій магнітний потік Фвр, який співпадає з віссю генераторної обмотки ОГ. Оскільки потік збудження пульсує з частотою 400 Гц, то з цією ж частотою змінюється величина струму і потоку обертання, а це значить, що е. р. с., що створюється в генераторній обмотці, буде мати частоту обертання ротора тахогенератора.
Крім розглянутих, в авіаційному обладнанні застосовуються і інші типи датчиків. Однак їхнє застосування обмежено специфічними особливостями конкретних пристроїв, в складі яких вони будуть розглянуті.
1.2.ПІДСИЛЮВАЧІ
Як правило, сигнали, що надходять з датчиків, мають недостатню потужність і потребують підсилення. Підсилювати сигнали можна по напрузі, струму, переміщенню, тиску, потужності тощо. У виучуваному розділі під терміном “ підсилювач ” розуміють пристрій, що підсилює сигнал по потужності і має однакову фізичну природу вхідної і вихідної величини. В пристроях і системах авіаційного обладнання застосовують електромашинні, релейні, магнітні і електронні(лампові і напівпровідникові) підсилювачі. Навести схеми всіх підсилювачів, використовуваних в авіаційному обладнанні, неможливо через їхню різноманітність. Більш доцільно розглянути схеми і роботу підсилювачів при вивченні пристроїв і систем, в яких вони використовуються.
1.3.ВИКОНАВЧІ ПРИСТРОЇ
Виконавчі пристрої – це вихідні елементи систем автоматичного регулювання. Вони впливають на органи управління об’єкта, забезпечуючи його стабілізацію або зміну визначених параметрів по заданому закону.
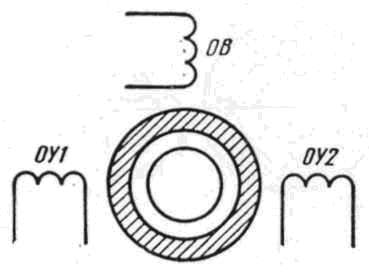
Рис. 1.7. Схема електродвигуна типу ДИД
В
авіаційному обладнанні використовують
електрогідравлічні, електропневматичні
і електричні пристрої. В системах
електронної автоматики і приладного
обладнання найбільш найбільше
розповсюдженні двофазні індукційні
двигуни типу ДИД, потужність яких 0,1-10
Вт. Ці двигуни маркуються так: ДИД-0,1;
ДИД-0,5; ДИД-1 тощо, де цифра показує їхню
потужність. Для зменшення моменту
інерції ротор виконують у вигляді
тонкостінного алюмінієвого циліндра.
На статорі (рис. 1.7) розміщенні три
обмотки: одна обмотка збудження ОВ, що
живиться змінним струмом з частотою
400 Гц при напрузі 36 В, і дві обмотки
управління ОУ, які зсунуті в просторі
на 90º відносно обмотки збудження і
живляться напругою, зсунутою на 90º в
часі відносно напруги збудження. Це
необхідно для створення магнітного
поля, що обертається. При частоті напруги
живлення f,
що дорівнює 400 Гц, і наявності в двигуна
однієї пари полюсів р=1 синхронна частота
обертання
![]() об/хв.
об/хв.

Рис. 1.8. Схема двигуна -генератора типу ДГ
Однак двигуни серії ДИД працюють в асинхронному режимі із ковзанням, близьким до 0,5. Відповідно, частота обертання ротора дорівнює приблизно 12000 об/хв. В слідкуючих системах двигуни ДИД використовуються з понижуючим редуктором. Для збільшення швидкодії слідкуючих систем при збереженні стійкості в авіаційному обладнанні застосовуються двигуни-генератори типу ДГ. Вони являють собою комбінацію двофазного асинхронного двигуна типу ДИД і тахогенератора змінного струму, об’єднаних в одному корпусі. Шкала потужностей двигунів-генераторів відповідає вказаним вище потужностям двигунів ДИД. Схема ДГ наведена на рис. 1.8. Сигнал з тахогенератора заводиться в підсилювач, що керує двигуном ДГ для підвищення динамічної стійкості слідкуючої системи. Виконавчі пристрої інших типів в системах електронної автоматики і приладному обладнанні застосовуються більш обмежено, і принцип їхньої роботи буде розглядатися при вивченні тих систем, де вони використовуються.
-
ЕЛЕКТРИЧНІ ДИСТАНЦІЙНІ ПЕРЕДАЧІ
Під електричними дистанційними передачами розуміють систему, призначену для передачі на відстань механічних переміщень електричними методами. Дистанційні передачі, що застосовуються в авіаційному обладнанні, розрізняють за рядом ознак:
-
по типу використаних датчиків – потенціометричні, сельсини тощо.
-
за потужністю – індикаторні і силові;
-
по роду струму – на постійному чи змінному струмі;
-
за точністю – точні і грубі.
Класифікація може проводитися і за іншими ознаками.
Потенціометрична індикаторна дистанційна передача
Потенціометрична індикаторна дистанційна передача застосовується в авіаційних дистанційних манометрах, компасах, покажчиках положення органів управління літального апарату і його агрегатів. Складається вона з лінійного і кругового потенціометричного датчика, логометричного покажчика і з’єднувальних проводів.
Варіант схеми з круговим потенціометром наведений на рис. 1.9. Живлення потенціометра здійснюється через щітки a і b. Відводи 1,2,3, зроблені через 120º, з’єднані з однойменними котушками магнітоелектричного логометра, рухома система якого являє собою постійний магніт. На одній осі з магнітом знаходиться стрілка індикатора. Система напруги між відводами потенціометра створює струми в котушках логометра, і його рухома система установлюється по результуючому магнітному потоку.
ЗАСОБИ АВТОМАТИЗАЦІЇ СИСТЕМ УПРАВЛІННЯ
Автомати регулювання управління
Автомати регулювання управління призначені для автоматичної зміни в польоті твердості завантаження ручки управління й передатного відношення проводки управління з метою забезпечення гарних характеристик статичної керованості літака у всьому діапазоні швидкостей і висот польоту.
Необхідність установки на літак АРУ пояснюється наступними обставинами.
Ручне управління літаком можливо тільки в тому випадку, якщо літак як об'єкт керування володіє на всіх режимах польоту цілком певними характеристиками стійкості й керованості.
Під стійкістю літака прийнято розуміти його здатність повертатися до вихідного режиму польоту при впливі збурювань, а під керованістю - здатність переходити від одного режиму польоту до іншого при впливі на важелі керування.
Стійкість і керованість літака тісно зв'язані між собою. Надмірно стійким літаком управляти важко, тому що він погано реагує на відхилення рулів і для здійснення маневру необхідно велике відхилення ручки керування. Пілотування нестійкого літака також важке, а іноді й неможливе, тому що найменше відхилення ручки управління приводить до різкої зміни режиму польоту.
Переміщення командних важелів керування й зусилля, що прикладають до них, є основними й необхідними зворотними зв'язками для льотчика по керуючому впливі.
Керування сучасними надзвуковими літаками здійснюється за допомогою гідропідсилювачів (бустерів) за необоротною схемою, у якій аеродинамічні моменти не передаються на ручку керування. Однак льотчик не може управляти літаком, не відчуваючи зусиль,,на ручці керування при її переміщенні. Ці зусилля дозволяють льотчикові правильно розміряти відхилення ручки керування з виконуваним маневром. Тому при необоротній схемі керування застосовуються пружинні завантажувальні пристрої, що створюють зусилля на ручці керування.
На керованість літака впливають швидкість і висота польоту, які можуть змінюватися у великому діапазоні. З їхньою зміною змінюється ефективність рулів і шарнірний момент від аеродинамічних сил, що передаються на ручку керування. Так, зі зменшенням висоти й збільшенням швидкості польоту збільшується щільність повітря й швидкісний напір, у результаті чого збільшуються ефективність рулів і шарнірний момент і для виконання однієї й тієї ж еволюції необхідно відхиляти рулі на менший кут. Тому при цих умовах передатне відношення від ручки керування до рулів повинне зменшуватися. Зі збільшенням висоти й зменшенням швидкості польоту зменшуються щільність повітря й швидкісний напір, а отже, ефективність рулів і шарнірний момент від рулів. У зв'язку із цим передатне відношення від ручки керування на руль необхідно збільшувати.
Передатне відношення на завантажувальний механізм зі збільшенням швидкості й зменшенням висоти польоту необхідно збільшувати.
Таким чином, для одержання однакового керування літаком необхідно змінювати передаточне число від ручки керування до руля й завантажувального механізму залежно від висоти польоту й швидкісного напору. Автомат регулювання управління, істотно полегшує пілотування літака, робить його природним і схожим на пілотування літака в системі керування рулями без гідропідсилювачів. Він дозволяє льотчикові зберігати практично однакову техніку пілотування при зміні швидкості й висоти польоту в широких межах.
Конструктивно. АРУ можуть бути виконані з одним або двома виконавчими електромеханізмами, а також у вигляді двох незв'язаних між собою систем.
В останньому випадку одна система забезпечує регулювання передаточного числа від ручки керування до стабілізатора (АРУ), а інша - зміну твердості завантаження ручки керування (АРЗ).
Принцип дії АРУ розглянемо на прикладі АРУ з одним виконавчим електромеханізмом ЗД (рис. 1).

Рис. 1.
При відхиленні ручки керування 1 механізм 3 повертається навколо осі 2. При цьому через шток 4 і кінематичний зв'язок 5 переміщення передається на гідропідсилювач ГУ, що забезпечує поворот стабілізатора 6 літака. Одночасно при повороті механізму З відбувається деформація пружини завантажувального механізму ЗМ, що створює на ручці керування зусилля, пропорційне її відхиленню від вихідного положення. Змінюючи положення штока електромеханізму триммерного ефекту МТЕ, тобто крапки закріплення другого кінця пружини, можна знімати зусилля з ручки.
Керування електромеханізмом МТЕ відбувається за допомогою перемикача П, розташованого на ручці керування літаком, зміна передаточного числа - від ручки керування до стабілізатора, і зміна твердості завантаження ручки керування здійснюється шляхом відповідного регулювання плечей 1б й 13 за рахунок переміщення штока 4 електромеханізма ЗД.
Зміна плечей 1б й 13 залежно від швидкісного напору й висоти польоту здійснюється відповідно до програми регулювання (рис.2).

Рис 2
Керування виконавчим механізмом АРУ здійснюється по командах блоку керування БУ з потенціометром зворотного зв'язку ПОС.
На
зльоті й на малих швидкостях у землі
(при q
<
q![]() ),
коли
керованість літака не
досягла оптимальної, шток механізму
АРУ займає положення, що відповідає
),
коли
керованість літака не
досягла оптимальної, шток механізму
АРУ займає положення, що відповідає
![]()
![]() (велике
плече) і
(велике
плече) і
![]() (легко).
При подальшому збільшенні швидкісного
напору плече
(легко).
При подальшому збільшенні швидкісного
напору плече
![]() зменшується,
підтримуючи постійну керованість
літака, а плече
зменшується,
підтримуючи постійну керованість
літака, а плече
![]() зростає, збільшуючи завантаження
ручки керування й імітуючи тим самим
збільшення моменту руля,
зростає, збільшуючи завантаження
ручки керування й імітуючи тим самим
збільшення моменту руля,
Починаючи
зі швидкісного напору q
=
qмакс.,
коли
з ростом числа М
починає
зменшуватися
ефективність рулів, плече
![]() залишається рівним
залишається рівним
![]() (мале
плече), а плече
(мале
плече), а плече
![]() залишається
максимальним.
залишається
максимальним.
Зі
збільшенням висоти польоту число М
збільшується
при тій же швидкості й тому обмеження
зміни плеча наступає раніше. На певній
висоті польоту H![]() шток механізму повністю висувається
й залишається в такому положенні на
всіх швидкостях польоту.
шток механізму повністю висувається
й залишається в такому положенні на
всіх швидкостях польоту.
Схема АРУ передбачає як автоматичне, так і ручне керування. Положення штока контролюється по покажчику. Покажчик має грубу оцифровку шкали в одиницях швидкості й висоти польоту. '
АРУ є життєво важливим пристроєм, від якого залежить безпека польоту. Найнебезпечнішими в таких автоматах є відмови, при яких відбувається зменшення розташовуваного діапазону кутів відхилень органа керування. Наприклад, при відмові АРУ в положенні штока на малому плечі діапазон відхилення стабілізатора може виявитися недостатнім для виводу літака на посадковий кут атаки, що приводить до збільшення посадкової швидкості.
Відмова АРУ в положенні штока на великому плечі найнебезпечніша на малих висотах і великих швидкостях польоту. У цьому випадку льотчик може відхилити ручку керування на величину, більшу, ніж потрібно для зміни режиму польоту, що може привести до розгойдування літака.
Так як відмова АРУ може привести до аварійної ситуації, у процесі експлуатації йому варто приділяти особливу увагу.
При попередній підготовці автомата перевіряється його точність роботи по програмі за допомогою установки ППУ-АРУ, що дозволяє імітувати швидкісний напір і розрідження в системі ПВД літака.
У польоті льотчик контролює роботу АРУ по покажчику* положення. У випадку великих розбіжностей покажчика АРУ й показань покажчика приладової швидкості (більше 100 км/ч) необхідно перейти на ручне керування й при посадці перевести виконавчий механізм на велике плече.