

Индуктивный датчик положения и малых линейных перемещений
Индуктивный датчик положения и малых (около 1 мм) линейных перемещений разрабатывался для применения в магнитных подшипниках и магнитных подвесах.
Работа индуктивного датчика положения основана на изменении индукции чувствительного элемента при изменении зазора между ним и ферромагнитным движущимся объектом.
Вариант конструкции чувствительного элемента представлен на рисунке №3.1. На половине ферритового кольца К7х4х2 600НН намотана обмотка из 100 витков провода ПЭВ-2 диаметром 0.05 мм. Торцы сердечника отшлифованы с применением алмазной пасты. Качество их поверхности определяет чувствительность и линейность датчика. Возможно также исполнение датчика в открытом со стороны подвижного ферромагнитного объекта броневом ферритовом сердечнике (внешний диаметр до 10 мм, параметры обмотки те же) с центральным стержнем. Перемещающийся объект, положение которого контролируется с помощью датчика, должен быть ферромагнитным (из материала с высокой магнитной проницаемостью). Возможно нанесение такого материала на движущийся объект в зоне чувствительности датчика.
Конструкция чувствительного элемента индуктивного датчика положения (на полукольце и в броневом сердечнике):
Рисунок 3.1
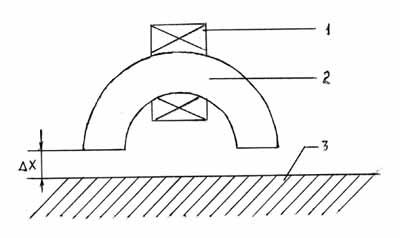
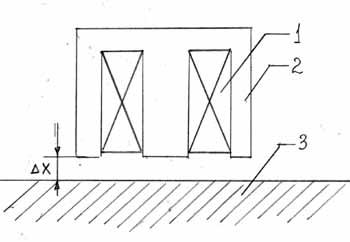
1 - обмотка, 2 - ферритовый сердечник, 3 - ферромагнитное основание (движущийся объект).
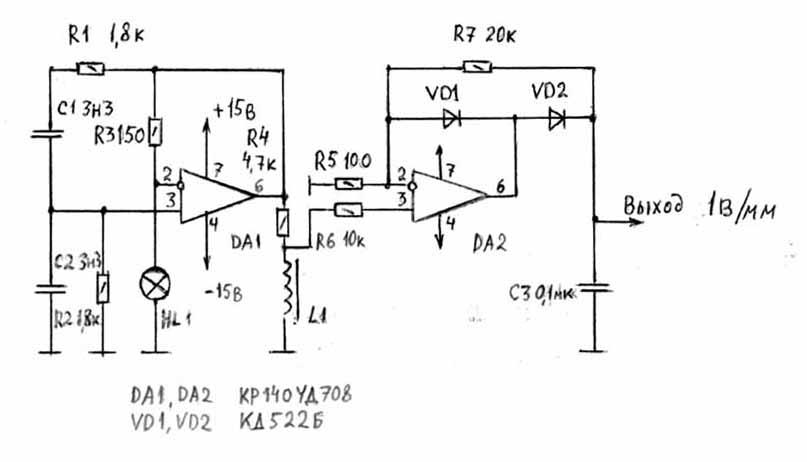
Принципиальная схема индуктивного датчика положения показана на рисунке №3.2. На микросхеме DA1 собран генератор синусоидального сигнала частотой около 20 кГц и амплитудой около 2 В. Частота генератора задается элементами R1C1R2C2. В цепь отрицательной обратной связи для поддержания необходимого коэффициента усиления включена лампа накаливания HL1. Напряжение с генератора через резистор R4 подается на обмотку L1 чувствительного элемента датчика. Напряжение на этой обмотке относительно общего провода зависит от индуктивности чувствительного элемента, которая определяется расстоянием от него до движущегося ферромагнитного объекта. На микросхеме DA2 собран детектор переменного напряжения, снимаемого с обмотки L1, коэффициент усиления которого выбирается из условия получения чувствительности датчика порядка 1 Вольт/миллиметр. Роль фильтрующего элемента выполняет конденсатор C3. Напряжение шумов на выходе датчика не превышает нескольких милливольт.
Схема принципиальная электронного преобразователя
Индуктивного датчика положения и малых линейных перемещений.
Рисунок 3.2
4. Бесконтактные выключатели
к содержанию
Одной из проблем, возникающих при автоматизации систем управления является надежное переключение исполнительных механизмов при достижении ими какого либо перемещения. В настоящее время широкое применение для этих целей нашли следующие типы выключателей:
индуктивные бесконтактные выключатели;
индуктивные бесконтактные выключатели.
Рассмотрим их более подробно.
Индуктивные бесконтактные выключатели
И ндуктивные
бесконтактные выключатели предназначены
для контроля положения механизма или
отдельных узлов. Они находят широкое
применение в станках, кузнечно-прессовом
оборудовании, литейных машинах, конвейерах
и т.д., во всех отраслях промышленности.
ндуктивные
бесконтактные выключатели предназначены
для контроля положения механизма или
отдельных узлов. Они находят широкое
применение в станках, кузнечно-прессовом
оборудовании, литейных машинах, конвейерах
и т.д., во всех отраслях промышленности.
Высокая надежность, независимость срока службы от числа срабатывания, надежная герметизация и возможность применения в неблагоприятных условиях, большое быстродействие, высокая долговечность - все эти преимущества позволяют с успехом заменять контактные путевые переключатели, повышая надежность схем управления различными производственными процессами.
Принцип действия бесконтактного конечного выключателя (ВК) основан на изменении амплитуды колебаний генератора при внесении в активную зону датчика металлического, магнитного, ферро-магнитного или аморфного материала определенных размеров. При подаче питания на конечный выключатель в области его чувствительной поверхности образуется изменяющееся магнитное поле, наводящее во внесенном в зону материале вихревые токи, которые приводят к изменению амплитуды колебаний генератора. В результате вырабатывается аналоговый выходной сигнал, величина которого изменяется от расстояния между датчиком и контролируемым предметом. Триггер преобразует аналоговый сигнал в логический, устанавливая уровень переключения и величину гистерезиса.
Структурная схема индуктивных бесконтактных выключателей представлена на рисунке №4.1.