

§4. Критерий устойчивости Михайлова
Рассмотрим левую часть характеристического уравнения (11), которая
представляет собой характеристический полином:
D(S) =a0sn+a1 sn-3 +...+an-1s + an. (l6)
Заменим в этом полиноме s = ω, где ω представляет собой угловую частоту
колебаний, соответствующих чисто мнимому корню характеристического
уравнения. При этом получим характеристический вектор
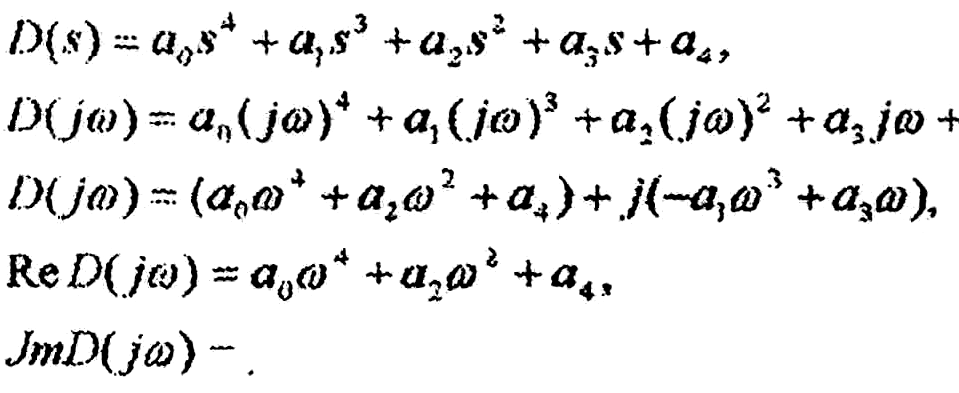
D(jω) =а0(Jω)n + а1(Jω)n-1 +... + an-1 Jω + ап =ReD(jω) + JmD(jω) = X(ω) + jY(ω) (17)
где вещественная часть будет содержать четные степени ω: X(ω) = ReD(jω) = an-an-2aω2+... (18)
а мнимая - нечетные степени ω:
Y(ω) = JmD(jω) = а n - 1 ω – аn - 2ω3 +... (19)
Из формулы (15) следует формулировка критерия устойчивости Михайлова. Система автоматического управления устойчива, если при
изменении
частоты ω от 0 до ∞ вектор D(j
ω) поворачивается на угол
![]() степень
характеристического уравнения D(s)=0.
степень
характеристического уравнения D(s)=0.
Вектор D(jco) при изменении частоты от нуля до ∞ (0 < ω <∞) вычертит в плоскости комплексного переменного некоторую кривую (годогфаф), которая
называется кривой Михайлова.
Тогда критерий Михайлова можно сформулировать: система устойчива, если годограф D(jco) с ростом частоты от нуля до ор, начинаясь на действительной оси, обходит последовательно в положительном направлении (против часовой стрелки) п квадрантов.
Практически годограф Михайлова строится по точкам, причем задаются различные значения частоты со и по формулам (18) и (19) вычисляются Х((й) и Y((o). Результаты расчетов сводятся в таблицу, по которой и строится годограф.
Оказывается, что годограф Михайлова для устойчивых систем всегда имеет плавную спиралевидную форму, причем конец его уходит в бесконечность в том квадранте комплексной плоскости, номер которого равен степени характеристического полинома (рис.4).
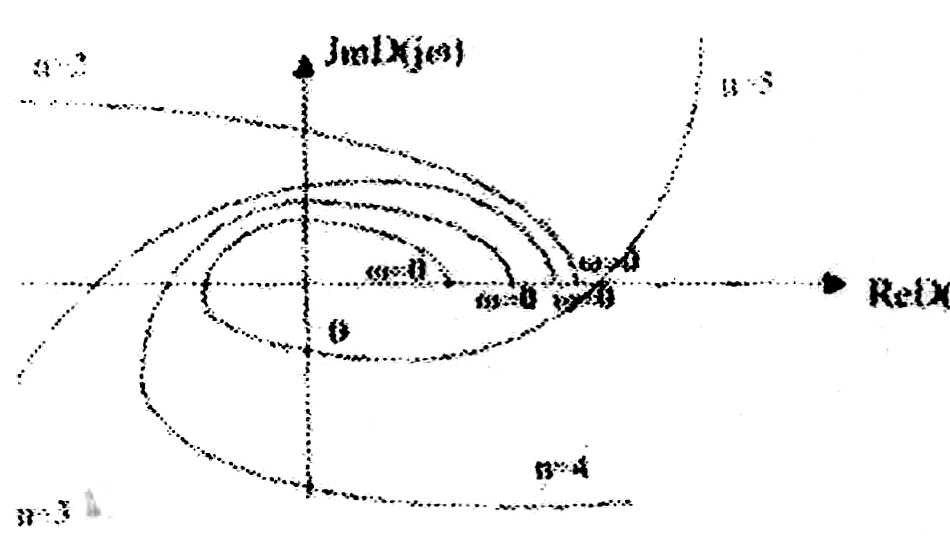
Рис.4. Частотный годограф Михайлова для устойчивых систем порядка п. Неустойчивость системы всегда связана с тем, что в годографе Михайлова нарушается последовательность прохождения квадрантов, вследствие чего
угол поворота вектора D(jω) оказывается меньшим, чем п*π/2
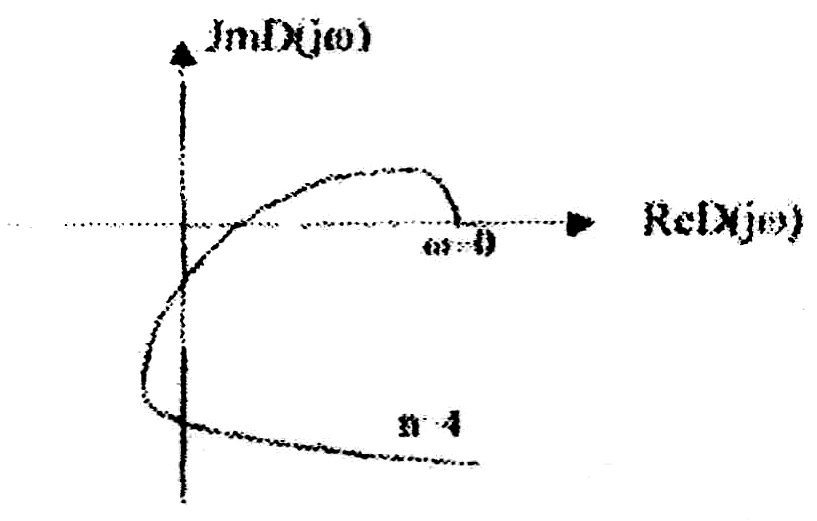
Рис.5. Частотный годограф Михайлова для неустойчивых систем четвертого порядка.
Наличие границы устойчивости всех трех типов рассмотрим на примере
системы четвертого порядка
В случае границы устойчивости первого типа (нулевой корень) отсутствует свободный член характеристического полинома ап-0, т.е. а4=0 и кривая Михайлова идет из начала координат (рис 6,а).
При границе устойчивости второго типа (колебательная граница устойчивости) характеристический полином обращается в нуль при подстановке s = jω0
D(jω0)=X(ω0)+jY(ω0)=0
откуда вытекают два равенства:
Это значит, что точкаω=ωо на кривой Михайлова попадает в начало координат (рис.6,6). При этом величина ωо есть частота незатухающих колебаний.
Для границы устойчивости третьего типа (бесконечный корень) конец годографа Михайлова перебрасывается, как показано на рис.6,в. При этом коэффициент ао характеристического полинома D(s), будет проходить через нулевое значение, меняя знак плюс на минус.
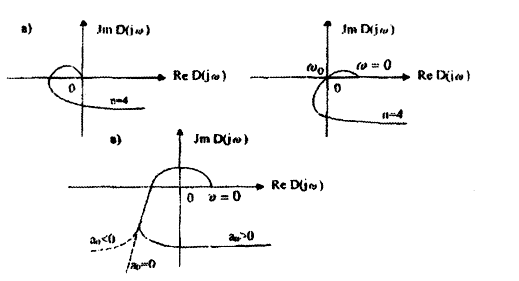
Рис.6. Кривая Михайлова для границ устойчивости первого, второго и третьего типа.