

5.Расчет горизонтально-наклонного ленточного конвейера.
5.1 Определение параметров трассы

Рис. 3 Расчетная схема горизонтально-наклонного ленточного конвейера
![]() м,
м,
![]() м,
м,
![]() ,
,
![]() ,
,
В соответствии с выбранной шириной ленты (в нашем случае с целью повышения показателей надежности ширина ленты наклонно-горизонтального конвейера равняется ширине ленты челнокового ленточного конвейера) принимаем коэффициент Kр и выбираем по табл. 3[2] радиусы вогнутого участка R2.
B=1200 мм, то R2=150 м, Kp=150 даН/см;
В соответствии с табл. 4[2] определяем параметры вогнутых участков.
Параметры вогнутых участков

По табл. 4.[2], принимаем при β=150 :
l Г= 25.88 м,
l=26.18 м,
h=3.41 м,
l1=13.17 м,
l2=12.72 м,
l3=0.86м,
l4=0.11 м,
l5=0.86 м.
b = R2/100,
b=150/100=1.5м.
![]() ,м
,м
![]() м,
м,
![]() ,м
(h
из табл. 4[2])
,м
(h
из табл. 4[2])
![]() м
м
![]() ,м
,м
![]() м
м
![]() ,м
,м
![]() м
м
![]() ,м
,м
![]() м
м
![]() ,м
,м
![]() м
м
5.2Тяговый расчет горизонтально-наклонного конвейера .
5.2.1Определение постоянных линейных нагрузок
Масса груза, приходящаяся на 1 м длины ленты, qг = Q/(3,6v), кг/м, численно равна линейной нагрузке от массы груза (Н/м), определяемой по формуле:
![]() qг
qг
![]() ,
,
где g = 9,81 м/с2 – ускорение свободного падения.
![]() кг/м
кг/м
Средняя линейная нагрузка от массы ленты qл.ср принимается по табл. 2.1. [2],
![]() Н/м;
Н/м;
Линейные нагрузки от массы вращающихся частей роликоопор верхней и нижней ветвей соответственно определяются по формулам:
 ,
,
 ,
Н/м
,
Н/м
где Gp, Gp - массы вращающихся частей одной роликоопоры соответственно верхней и нижней ветвей ленты, кг; принимаются по табл.2.2; Gp=24.3 кг; Gp=26.0 кг; dp, dp- диаметры роликов роликоопор верхней и нижней ветвей ленты, также принимаются по табл. 2.2[2]; dp=127 мм, dp=127 мм;
lp, lp - расстояние между роликоопорами соответственно верхней и нижней ветвей ленты (шаг роликоопор), м.
Расстояние lp зависит от ширины ленты, насыпной плотности и крупности груза, а также провисания ленты между роликоопорами и места установки роликоопор. На прямолинейных участках трассы для большинства конвейеров угольной и горнорудной отраслей промышленности lp= 11,2 м. На выпуклых участках рабочей ветви расстояние между роликоопорами верхней ветви обычно принимают 0,30,5 м. Роликоопоры нижней ветви в большинстве случаев устанавливают на кронштейнах стоек средней части конвейеров, шаг которых lp принимают равным на прямых и вогнутых участках трассы 2,43 м, на выпуклых участках 11,5 м. Линейные нагрузки qp и qp (Н/м) приведены в табл. 2.3.
Принимаем lp=1.2 м, lp=2.4 м;
![]() ,
Н/м,
,
Н/м,
![]() ,Н/м;
,Н/м;
По табл. 2.3[2] принимаем qp = 203 мм и qp=118 мм.
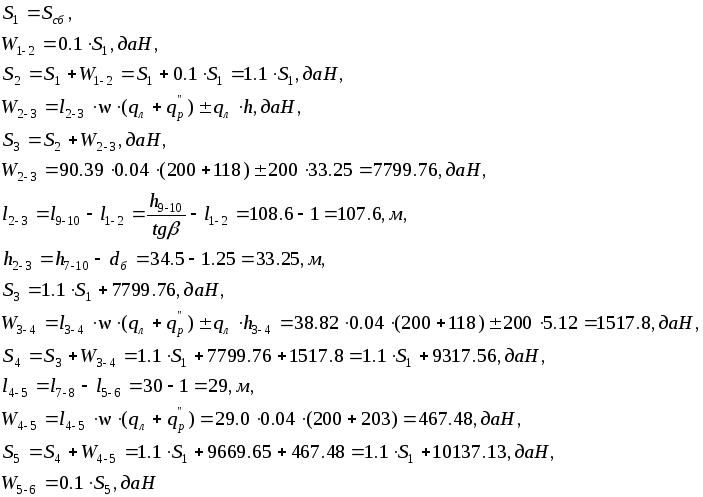
5.2.2Определение натяжений ленты в характерных точках трассы конвейера.
Составляются
выражения, определяющие натяжения ленты
во всех характерных точках, от
![]() до
до
![]() ,
выражая последова- тельно натяжения в
данных точках через натяжение
,
выражая последова- тельно натяжения в
данных точках через натяжение
![]() ,
даН, учитывая, что натяжение в каждой
характерной точке трассы Si
равно сумме
натяжений в предыдущей точке Si-1
и сопротивления
участка W(i-1)
- i
:
,
даН, учитывая, что натяжение в каждой
характерной точке трассы Si
равно сумме
натяжений в предыдущей точке Si-1
и сопротивления
участка W(i-1)
- i
:

где W – сопротивления рассматриваемых участков

![]()
Отсюда численно находим все натяжения:

![]() ,
,
где b1, b2 – коэффициенты, b1=1.26, b2=349825.6.
Определяется значение тягового фактора e приводного блока, который ус танавливает соотношение между натяжениями ветвей лен- ты, набегающей Sнб на приводной барабан и сбегающей Sсб с привод ного барабана, и за висит от фрикционной характе- ристики бараба на:
![]() ,
,
где e = 2,72 - основание натурального логарифма; - коэффициент сцеп- ления ленты с приводным барабаном (0.2÷0.35); - угол обхвата привод- ного барабана лентой или = 1 + 2 – суммарный угол обхвата для двухбарабанного привода, рад.
![]()
Значения e
приведены в табл. 2.6.[2] принимаем
![]() ,
,
![]() ,
,![]() (значения
(значения
![]() в числителе – в градусах, в знаменателе
– в радианах).
в числителе – в градусах, в знаменателе
– в радианах).