

43 Звенья с модулированием сигнала управления
( звенья на переменном токе )


ГНЧ – генератор несущей частоты
Х – моделирует несущую частоту
В звеньях с модулированием сигнала
управления изучается поведение огибающей
кривой.
звеньях с модулированием сигнала
управления изучается поведение огибающей
кривой.
4 7
Статическая
САР. Статическая точность САР.
7
Статическая
САР. Статическая точность САР.
Статическая САР показывает насколько точно САР поддерживает выходные корд-у при заданном знач. управляющ. велеч. Ошибка САР появ-я в результате действия возмущения.
Действие возмущ. не зависит от сигн. упр-я. Возмущ. измен-я по произвольн. закону.
С![]() татическая
точность обозначается S.
татическая
точность обозначается S.
Δyрег – это отклонение выходн. корд. придейств. возмущ. f в замкн. сист.
Δ![]()
![]() yнерег
- это отклон.
выходн. корд. при таком же действии
возмущения в разомкн. сист.
yнерег
- это отклон.
выходн. корд. при таком же действии
возмущения в разомкн. сист.
Статизм связан с велечиной Крс
Δ![]() рс
= Δyнерег
Δзс
= Δyрег
рс
= Δyнерег
Δзс
= Δyрег
Статическая точн. может прест-я в %
Проценты взяты относит. того знач. кот. задано
Структ. схема представл. на рис. может быть преставлена 2-мя видами САР:
-
статическая САР
-
астотическая САР
Статическая САР – это такая САР у кот. все звенья в прям. и обрат. связи позиционные. Точность стат. САР опред-я выраж-м (1). Учитывая, что Крс нельзя сильно увелич., т.к. САР станов-я неустой-м, статич. САР может только уменьш. ошибку, но полностью её не ликвид-ть.

48 Астатическая САР. Динамическая точность САР.
А стотич.
САР отлич-я от стат. тем, что в цепи упр-я
астатич-й САР имеется интегратор.
стотич.
САР отлич-я от стат. тем, что в цепи упр-я
астатич-й САР имеется интегратор.
![]()
Астат. САР не имеет стат. ошибки.
Особенности астат.САР:
1) Если возмущ. действ-т после интегр-ра , то стат. ошибка вых корд. = 0. Но бывают такие САР у кот. возмущ. действ-т до интегр-ра. В этом случае в астат САР появ-я стат. ошибка.
2) астат. САР может регламент-ть ошибку перех-х проц-в. ( регламентировать – выдерживать на уровне задан-го знач. ) Ошибка перех-х проц-в наз-я динамич. ошибкой ().
![]()
![]() - скорость
изменен. управ-го сигн.
- скорость
изменен. управ-го сигн.
-
Е
 сли
в астат. САР только 1интегр.
сли
в астат. САР только 1интегр.
Звено, то гов-т, что
САР содер-т астатизм I-го пор-а или астат. САР I – го пор-а
-
Если в астат. САР 2 интегратора вкл. послед-о, то это астат. САР II-го пор-а
Атат. САР II-го пор-а может свести ошибку к 0, т. е. =0.

49 Устойчивость САР. Основное условие устойчивости ( по Ляпунову )
Устойчивое САР – это такая САР, кот. после внешнего возд-я возвращ-я в исходное сост-е.
Осн. усл. уст. САР. ( по Ляпунову )
Устойч. сист. зависит
от её собсв. динамич. св-в, кот. опр-я её
однородн. диф. ур-м.
Р![]() ешение:
ешение:
1) общее
![]() корень
хар-го ур-я
корень
хар-го ур-я
Чтобы сист. была
устойч. необх. ![]()
Это возможно в том случае, если действ. корни и действит. части комплексн. корней будут отрицательн. (« - »)
Это и есть основное условие устойчивости САР.

45 Линейные САР. Передаточная функция разомкнутой и замкнутой САР.
С
 АР
– это сист. звеньев соед-х м/у собой и
имеющих прямую цепь упр-я и цепь обратной
связи, причём сигн. ОС сравнивается с
прямой связью с помощью сумматора С. А
упр-е прямой цепью осущ-я по ошибке
м/у сигн. задания
и сигн. ОС.
АР
– это сист. звеньев соед-х м/у собой и
имеющих прямую цепь упр-я и цепь обратной
связи, причём сигн. ОС сравнивается с
прямой связью с помощью сумматора С. А
упр-е прямой цепью осущ-я по ошибке
м/у сигн. задания
и сигн. ОС.
Линейное САР – такая в кот. не содержится звенья содержащие в статической хар-ке существенную нелинейность. ( существенная нелинейность – это такая , кот. нельзя линеаризовать.)
Л
 инейное
САР содержит звенья с линеаризуемыми
статич. хар-ми.
инейное
САР содержит звенья с линеаризуемыми
статич. хар-ми.
Разновидности ОС:
1) жёсткая ОС – это такая в кот. экв. передаточн. ф. ОС содержит все позиционные звенья.
2) гибкая ОС – Если хотя бы 1 звено в ОС будет диффирин-м, то это гибкая ОС.
Эквивалентная передаточная ф. замкнутой сист. упр.
Ч асто
САУ содер-т неск. контуров упр-я. В этом
случае часто треб-я замкн-ю. САУ представить
в виде экв. звена.
асто
САУ содер-т неск. контуров упр-я. В этом
случае часто треб-я замкн-ю. САУ представить
в виде экв. звена.![]()
(+) если САР с ООС (-) если САР с ПОС
Передаточная ф. разомкнутой системы Wрс.
ТАР раб-т с структ. схемой в кот. имеется единичн. ОС

практическая САР теоретическая САР
![]()
![]()
WРС – это есть произведение звеньев, наход-ся в прямой цепи упр-я и в цепи ОС до точки размыкания САР.
П о
WРС
осуществляется анализ и синтез САР.
о
WРС
осуществляется анализ и синтез САР.
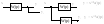
46 Правило преобразования структурных схем.
Учитывая, что ТАР работает с сист. у кот. только 1 ОС, А структ. сх. могут иметь неск. ОС, в том числе перекрещ-я связи, правило преобразования таких схем.
Схемы сначала преобразуются в многоконтурные, а потом в одноконтурный.
ПРАВИЛО:
1 .
.
![]()
2 .
x
= x1
= x2
y
= y1
+ y2
.
x
= x1
= x2
y
= y1
+ y2
![]() Если
сист. содер-т неск. звеньев включ-х
паралл-но, то экв. сх. будет равна сумме
звеньев.
Если
сист. содер-т неск. звеньев включ-х
паралл-но, то экв. сх. будет равна сумме
звеньев.
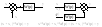
3. переноса точек ответвления и сумматора
 3.1. перемещение
точ. ответвления по ходу упр-го сигн.
3.1. перемещение
точ. ответвления по ходу упр-го сигн.
х1(р)
= х(р)
![]()
3.2. перенос точ. ответвления в напр-ии обратно ходу сигн.
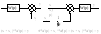
4. перенос сумматоров
1 )
Если сумматоры
)
Если сумматоры
оказались на одной
линии, то порядок их
располож-ия не имеет
смысла.
 примечание:
примечание:
Если точки ответв.
оказались на одн.
линии, то их порядок
располож. так же не
имеет знач.
2) 1) перенос сумматора по ходу сигн
2) перенос сумматора в противоп. напр. по ходу сигн.
-
перенос точки ответвления ч/з сумматор

п ри
переносе сумматоров и точек ответвления
нельзя переносить сумматор ч/з точку
отв. и точ. отв. ч/з сумматор.
ри
переносе сумматоров и точек ответвления
нельзя переносить сумматор ч/з точку
отв. и точ. отв. ч/з сумматор.
44 Элементарный объект управления
Больш-во реальн. объектов многомерны, поэтому при постр. САПР необх. многомерн. объекты предст-ть в виде одном-го.
-
Из множества вых-х коор-т выбир-т ту, кот. необх. регул-ть.
-
Выбир-я единств-е упр-щее возд-ие. Это упрывл-щее возд-ее должно наиболее эффект-но среди др. действ-ть на вых-е пар-ры. Возмущ-я ост-я те же.
-
Те упр-щие корд-ты, кот не исполь-но при управл-ии одномерн. объектом , они переходят в разряд входн. парам-в. Те упр-щие воздей-я. кот. перешли в разряд входных парам-в, счит-т, что в проц-е исполья-я остаются постоянными.
Это и есть элементарный ОУ, у кот. вых-я коор-а регулир-я входн. корд. и прирощен-ми f , но при всём этом вых-я коор-а ни какого возд-я на вход-й неимеет.