

Содержание
Введение 2
1 Индукционный тахометр 3
2 Представление устройства в виде структурной схемы 11
3 Общие сведения об основных характеристиках СРП 12
4 Синтез интегральной передаточной функции СРП 16
Заключение 22
Список использованной литературы 23
Введение
Есть среды, которые не могут быть описаны в сосредоточенных параметрах (электромагнитное поле, электростатическое поле, течение потока, гравитационное поле, температура и т.д.). Система с распределенными параметрами (СРП) - это система, в которой практически все сигналы (особенно входной и выходной) зависят от пространственных координат и времени. Система с сосредоточенными параметрами является частным случаем СРП и вводится для упрощения и решения задач на первом (нулевом) этапе.
Цель курсовой работы - синтез интегральной передаточной функции для объектов управления с распределенными параметрами. В данной работе решается вопрос построения математической модели генератора постоянного тока
1. Датчики для измерения частоты вращения Индукционные тахометры
При диагностировании агрегатов машин одним из важных контролируемых параметров является частота вращения (угловая скорость) различных вращающихся элементов. Однако конструкция машин зачастую не позволяет непосредственно подсоединяться ко многим вращающимся деталям, что резко ограничивает возможность методов диагностирования и требует применения бесконтактных датчиков.
Для измерения частоты вращения коленчатого вала двигателя и различных вращающихся деталей агрегатов машин широко применяют датчики, преобразующие частоту вращения в электрическое напряжение или частоту электрических импульсов. По результатам анализа и экспериментальных исследований наиболее приемлемым оказались преобразователи индукционного типа, основанные на принципе создания ЭДС в обмотке, помещенной в поле постоянного магнита при изменении магнитного потока. Конструктивное исполнение датчиков данного типа довольно разнообразно.
Индукционные (магнитоэлектрические) датчики частоты вращения (бесконтактные) коленчатого вала двигателя, применяемые в приборах ИМД-2М и ИМД-Ц (рис. 1, а), ЭМДП-2 (рис. 1, б, в), в установке КИ-13940 (рис. 2), близки по конструкции.
Датчик к приборам ИМД-2М и ИМД-Ц состоит из катушки индуктивности /, намотанной на сердечнике 2, прижатом сталь- ной гайкой 3 к постоянному магниту 5. Выводы катушки индуктивности соединены с проводом 9, укрепленным в корпусе. Поверх' корпуса свободно посажен штуцер 7 с контргайкой 8. Продольное перемещение катушки / и магнита 5 ограничивается с обеих сторон. Для предотвращения перетирания провода 9 магнитом провод центрируется в гильзе 4 пробкой 6.
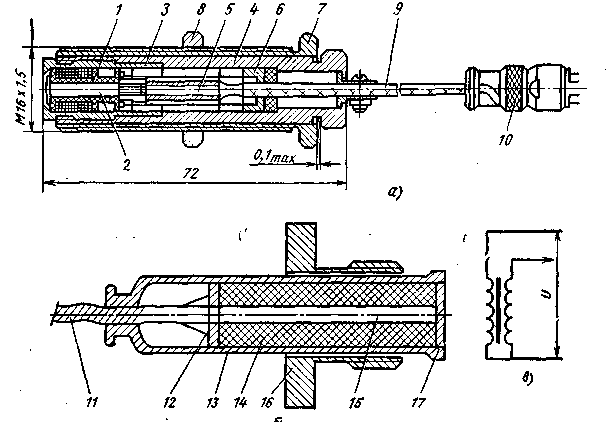
Рис. 1. Индукционные датчики частоты вращения:
а— к приборам ИМД-2М и ИМД-Ц; б —к приборам ЭМДП-2; s — схема датчика: 1 — катушка; 2 — сердечник; 3 — стальная гайка; 4 — гильза; 5 — постоянный магнит; 6 — пробка; 7 — штуцерная гайка; 8 — контргайка; 9 — провод; 10 — разъем; // — кабель; 12 — стальной полюс датчика; 13 — корпус датчика; 14 — обмотка; 15 — сердечник; 16 — бронзовая втулка;
С помощью штуцера 7 датчик вворачивается в специальное резьбовое отверстие в кожухе маховика двигателя напротив зубчатого венца с таким расчетом, чтобы удаленность торца датчика от поверхности зубьев составляла 2—4 мм. С помощью провода 9 и разъема 10 датчик присоединяется к приборам ИМД-2М и ИМД-Ц.
Принцип действия датчика основан на наведении электрического сигнала (последовательных импульсов) с частотой, пропорциональной частоте вращения вращающегося зубчатого венца при условии, что датчик установлен от поверхности головок зубьев венца на 2—4 мм.
Частота импульсов наводимого напряжения в обмотке, пропорциональная частоте вращения коленчатого вала, после соответствующих преобразований воспринимается счетчиком импульсов, который измеряет частоту вращения коленчатого вала за определенный промежуток времени.
Датчик выполняет две функции:
является первичным преобразователем при определении мощности двигателя по величине углового ускорения;
служит для измерения частоты вращения коленчатого вала двигателя.
В качестве индикаторов используются микроамперметр М265-М с пределом измерения от 0 до 100 мкА (в приборе ИМД-2М), шкала которого отградуирована соответственно в единицах мощности и частоты вращения, и цифровой индикатор — в приборе ИМД-Ц.
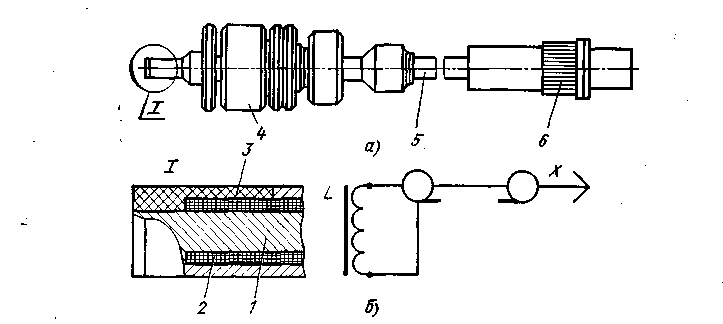
Рис. 2. Индукционный датчик (ОВИ-1, ОВИ-2) частоты вращения и отметки верхней мертвой точки:
а. — общий вид; б — принципиальная схема: в.—• сердечник; 2 — катушка; 3 — латунный корпус; 4 — втулки резьбовые; 5 — кабель; 6 —разъем
Несколько отличается от рассмотренной выше конструкции датчик прибора ЭМДП-2, так как в одну из обмоток датчика (рис. 1, б) подается напряжение питания (U=12 В), а с другой — снимается сигнал, вырабатываемый в момент прохождения установочного отверстия в маховике коленчатого вала двигателя около полюса датчика. Номинальное значение амплитуды выходного сигнала составляет около 1 В. Датчик устроен следующим образом: на сердечник 15 намотана обмотка 14, состоящая из 8000 ± ±500 витков провода ПЭЛ-0,05. Концы катушки выведены через стальные кольца к экранированному проводу. Катушка изолирована слоем электротехнического лака. С торца корпуса 13 датчик закрывается кольцом 17 из немагнитного материала. После сборки датчик намагничивается. Для измерения частоты вращения и контроля метки верхней мертвой точки двигателя датчик устанавливается в отверстие под штифт верхней мертвой точки на двигателе или в специально подготовленное отверстие М10Х1.5 на расстоянии 2—3 мм от плоскости маховика и крепится с помощью цангового зажима.
Дополнительную подпитку током 7=10 мА также имеют датчики ОВИ-1 и ОВИ-2 частоты вращения и отметки верхней мертвой точки (рис. 2) установки КИ-13940.
Эти датчики предназначены для выработки электрических импульсов, передние фронты которых синфазны с определенными моментами в цикле работы дизеля, например, соответствуют моментам прохождения верхней мертвой точки поршнем первого цилиндра дизеля. Они также предназначены для преобразования частоты вращения коленчатого вала двигателя в пропорциональную частоту электрических импульсов.
Принцип действия ОВИ-1 и ОВИ-2 заключается в возникновении импульсов напряжения в проволочной катушке при изменении пронизывающего ее магнитного потока.
Исходный магнитный поток создается самой катушкой — через нее пропускается стабилизированный постоянный ток подмагни-чивания /=10 мА, £7=10 В. Датчики ОВИ-1 и ОВИ-2 устанавливаются на двигателе у вращающейся ферромагнитной массы, геометрия которой (отверстие в маховике или зубья венца маховика) при вращении обеспечивает периодическое изменение магнитного сопротивления магнитному потоку, создаваемому датчиком. Возникающие изменения магнитного потока индуктируют в катушке ОВИ-1 или ОВИ-2 импульсы ЭДС.
Конструктивно ОВИ-1 и ОВИ-2 идентичны и состоят из маг-нитомягкрго сердечника из пермаллоя, на котором помещена обмотка, содержащая около 5000 витков провода ПЭВ-1 диаметром 0,04 мм. Сердечник с обмоткой заключен во внутрь диамагнитного (латунного) корпуса с продольным разрезом на конце для устранения коротко замкнутого витка в наиболее чувствительной зоне. Снаружи корпуса имеется система резьбовых втулок с цанговым зажимом и фигурным упором, позволяющая закрепить ОВИ-1 (ОВИ-2) в посадочном резьбовом отверстии Ml О XI,5 и Ml 6 XI,5. Принципиальная схема датчика приведена на рис. 2, б.
Датчик частоты вращения установки «Урожай-1Т» по пара-, метрам аналогичен датчику, показанному на рис. 1, а, но отличается конструктивно.
Датчики частоты вращения и отметки верхней мертвой точки в приборах СИФД и КИ-11331 также индукционные с подпиткой обмотки с выходным сигналом 1—1,5 В. Конструкция их и принцип работы аналогичны датчику, показанному на рис. 1, б.
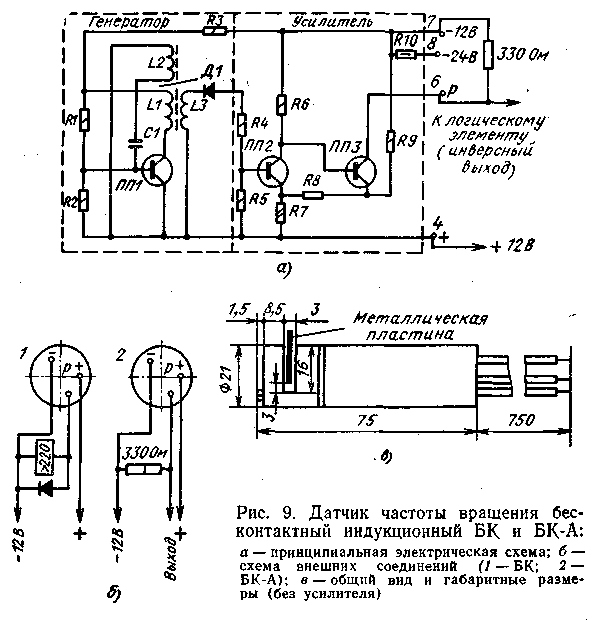
Датчики частоты вращения бесконтактные индукционные БК и БК.-А. Принципиальная схема датчиков (рис. 3, а) состоит из генератора и усилителя на транзисторах. При введении в щель между катушками базовой и коллекторной обмоток генератора металлической пластинки уменьшается коэффициент обратной связи, вызывающий срыв генерации. Нормально закрытый выходной транзистор ППЗ открывается и вызывает срабатывание реле или логического элемента, включенного в цепь коллектора транзистора ППЗ.
Конструктивно датчики выполняются в двух вариантах: 1) головка, генератор и усилитель датчика смонтированы вместе (БК; БК-А); 2) головка датчика отделена от генератора и усилителя |БК-0; БК-А-0; БК-5-0; БК-А-5-0).
Головка датчика (рис. 3, в) имеет паз шириной 3 или 5 мм для прохода металлической пластинки. На торце головки установлена регулировочная пластина (магнитный шунт), которая поворотом в определенное положение производит необходимое ослабление обратной связи генератора.
Датчики отличаются по схеме электрических соединений (с реле или логическим элементом); напряжению питания (12 В или 24 В постоянного тока) и ширине щели (3 или 5 мм).
Преобразователи частоты вращения Д-1М и Д-1ММ являются встроенными средствами контроля на дизелях ЯМЗ-240 и ЯМЗ-240Н. Преобразователи укомплектованы вторичными приборами со стрелочным указателем.
В целях диагностирования преобразователи Д-1М и Д-ШМ могут использоваться для определения мощности двигателя и частоты вращения коленчатого вала.
Преобразователь Д-1М (Д-1ММ) представляет собой трехфазный генератор переменного тока с постоянным магнитом-ротором. С помощью хвостовика ротора преобразователь соединяется с коленчатым валом дизеля. Ротор вращается в двух подшипниковых опорах. Статор с целью уменьшения потерь в нем от вихревых токов набран из пластин трансформаторного железа толщиной 0,5 мм и имеет шесть пазов. Пластины статора изолированы друг от друга изоляционным клеем. Обмотка статора выполнена из медного провода марки ПЭМ-2 или ПЭВ-2. Каждая фаза обмотки статора имеет по две катушки. Фазы соединены звездой.
При вращении коленчатого вала дизеля в преобразователе Д-1М (Д-1ММ) появляется ЭДС с частотой, пропорциональной частоте вращения коленчатого вала. Междуфазовое напряжение преобразователя при номинальной частоте вращения коленчатого вала дизеля составляет от 10,5 до 12,5 В.