

курсовая работа / Курсовая
.docВведение
Электромагнитные датчики предназначены для преобразования перемещения в электрический сигнал за счет изменения параметров электромагнитной цепи. Эти изменения могут заключаться, например, в увеличении или уменьшении магнитного сопротивления Rм магнитной цепи датчика при перемещении сердечника. Если перемещается не сердечник, а обмотка, то происходит изменение потокосцепления обмотки. Таким образом, изменения в электромагнитной цепи датчика могут быть вызваны как перемещением элемента магнитной цепи (сердечника или якоря), так и перемещением элемента электрической цепи (обмотки). В результате таких перемещений изменяется индуктивность обмотки L или ее взаимоиндуктивность М с обмоткой возбуждения. Поэтому в технической литературе электромагнитные датчики часто называют индуктивными.
Электромагнитные датчики обычно рассматривают как параметрические, поскольку величины L и М зависят от перемещения х: L=f(x), M=f(x). Но электромагнитные датчики с изменяющейся взаимоиндуктивностью можно отнести и к генераторному типу, поскольку в результате изменяется и ЭДС обмотки, т. е. E=f(x).
С помощью электромагнитных датчиков можно автоматически измерять механические силы, давление, температуру, свойства магнитных материалов, определять внутренние полости и трещины в деталях (дефектоскопия), толщину немагнитных покрытий на стали, расход жидкостей и газов в трубопроводах и др.
Электромагнитные датчики имеют следующие достоинства: простота и дешевизна конструкции, механическая прочность, высокая надежность за счет возможности съема выходного сигнала без скользящих контактов, возможность питания от промышленной сети частотой 50 Гц, возможность получения достаточно высокой мощности выходного сигнала, возможность работы как в диапазоне малых (доли мм), так и больших (метры) перемещений.
К недостаткам электромагнитных датчиков следует отнести влияние на выходной сигнал внешних электромагнитных полей и частоты питающего напряжения, а также возможность работы только на переменном токе.
Изменение индуктивности и взаимоиндуктивности может происходить и под влиянием механических напряжений в сердечнике электромагнитного датчика. Такие напряжения приводят к изменению магнитной проницаемости ферромагнитного материала сердечника. Электромагнитные датчики, основанные на таком физическом явлении, называются магнитоупругими датчиками.
Электромагнитные датчики (индуктивные, трансформаторные, индукционные, магнитоупругие) получили широкое распространение в системах автоматики.
Принцип действия и основы расчета индуктивных датчиков.
Простейший индуктивный датчик представляет собой дроссель с переменным воздушным зазором в магнитопроводе. На рис. 1.1 показаны две наиболее распространенные конструктивные схемы индуктивных датчиков на одном сердечнике. Это одинарные индуктивные датчики. На сердечнике 1 из электротехнической стали размещена обмотка 2, подключаемая к источнику переменного напряжения. Магнитный поток в сердечнике замыкается через якорь 3, который может перемещаться относительно сердечника 1. Якорь 3 механически связан с деталью, перемещение которой необходимо измерить. Эта деталь на рисунке не показана, но перемещение ее может происходить в вертикальном (рис. 1.1, а) или в горизонтальном направлении (рис. 1.1, б). Перемещение якоря изменяет магнитное сопротивление магнитной цепи, состоящей из сердечника, якоря и воздушного зазора δ. Следовательно, изменится индуктивность обмотки 2. Поскольку эта обмотка включена на переменное напряжение, ток в обмотке 2 будет определяться ее полным сопротивлением, в которое входит и индуктивное сопротивление. С увеличением воздушного зазора магнитное сопротивление увеличивается, а индуктивность, индуктивное и полное сопротивления
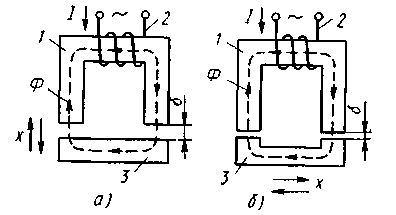
Рис. 1.1. Индуктивные датчики
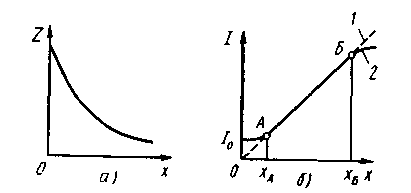
Рис. 1.2. Характеристики индуктивного датчика
у![]() меньшаются
(рис. 1.2, а).
Следовательно,
ток в обмотке увеличивается
(рис. 1.2, б).
Полагая
ток I
в обмотке за выходной сигнал датчика,
а перемещение x
— за
входной сигнал, имеем выходную статическую
характеристику в виде графика
меньшаются
(рис. 1.2, а).
Следовательно,
ток в обмотке увеличивается
(рис. 1.2, б).
Полагая
ток I
в обмотке за выходной сигнал датчика,
а перемещение x
— за
входной сигнал, имеем выходную статическую
характеристику в виде графика
Найдем выражение, определяющее зависимость тока в обмотке датчика от перемещения. Анализ проведем применительно к конструктивной схеме, показанной на рис. 1.1, а. В этом случае приращение перемещения х всегда равно приращению зазора δ, поэтому нам необходимо получить математическую зависимость тока I от зазора :
![]()
Пусть обмотка датчика включена на напряжение питания :
![]()
где U — действующее значение напряжения, ω — угловая частота, рад/с. По закону Ома, действующее значение тока в обмотке
![]()
(1.1)
где z — полное сопротивление обмотки датчика, Ом, состоящее из активного R и индуктивного XL сопротивлений :
![]()
Индуктивное сопротивление XL пропорционально индуктивности L и частоте питания
![]()
После подстановки получим : (1.2)
![]()
Индуктивность обмотки датчика с числом витков ω :
![]() где
Ф — магнитный поток сердечника, Вб.
Принимаем, что весь магнитный
поток (1.3)
где
Ф — магнитный поток сердечника, Вб.
Принимаем, что весь магнитный
поток (1.3)
проходит через воздушный зазор, т. е. потоки рассеяния отсутствуют. Тогда (1.4)
![]()
Здесь RM — магнитное сопротивление магнитопровода датчика, Гн-1. Это сопротивление слагается из сопротивления стали сердечника и якоря RСТ и сопротивления воздушного зазора RB: (1.5)
![]()
Сопротивление воздушного зазора пропорционально удвоенной длине воздушного зазора 8, поскольку магнитный поток проходит через воздушный зазор дважды : (1.6)
![]()
где SM – поперечное сечение воздушной части магнитопровода.
П![]() осле
подстановки (1.5) и (1.6) в (1.4) получим
выражение для магнитного
потока : (1.7)
осле
подстановки (1.5) и (1.6) в (1.4) получим
выражение для магнитного
потока : (1.7)
Выражение для индуктивности получаем : (1.8)
 Полное
сопротивление обмотки : (1.9)
Полное
сопротивление обмотки : (1.9)
Анализ формулы (1.9) показывает, что с увеличением воздушного зазора (а следовательно, и перемещения) полное сопротивление уменьшается, стремясь в пределе к величине активного сопротивления обмотки R. Зависимость полного сопротивления z от величины зазора δ показана на рис. 1.2, а. Ток в обмотке датчика (1.10)
Если входным сигналом датчика считать перемещение якоря х от начального положения при δ = 0 в сторону увеличения зазора (по рис. 1.1, а), то формула после замены δ на х представляет собой статическую характеристику одинарного индуктивного датчика, т.е. I=f(x). График статической характеристики показан на рис. 1.2, б. Как видно из анализа формулы и графика, зависимость I=f(х) имеет нелинейный характер. Однако на графике можно выделить участок АБ, на котором соблюдается прямая пропорциональность между входным и выходным сигналами. Этот участок называется рабочим, датчик используется именно в диапазоне входных сигналов от ха до хб. Следовательно, датчик всегда имеет некоторый воздушный зазор, не меньший jca. В большинстве конструкций индуктивных датчиков магнитопровод ненасыщен и магнитная проницаемость материала сердечника весьма велика. Поэтому магнитное сопротивление воздушного зазора (уже при δ = ха) значительно больше магнитного сопротивления стального сердечника, т. е. RB>>RCT.
Пренебрегая величиной RCT , получаем упрощенное выражение для индуктивного сопротивления : (1.11)

Пренебрегая в (1.2) величиной R, с учетом (1.11) получаем приближенное выражение статической характеристики индуктивного датчика (1.12)
где К— коэффициент передачи, определяемый напряжением и частотой питания, конструктивными размерами сердечника и числом витков обмотки датчика : (
На практике диапазон изменения воздушного зазора для индуктивных датчиков по рис. 1.1, а не превышает 4—5 мм. Значительно больший диапазон изменения входного сигнала (перемещения) имеют индуктивные датчики по рис. 1.1, б. Такие датчики имеют близкую к линейной статическую характеристику при перемещениях якоря до 10—15 мм.
С увеличением зазора чувствительность датчика резко уменьшается. А при выборе в качестве начальной точки малой величины зазора можно получить большую чувствительность и значительный сигнал разбаланса мостовой схемы, что позволяет в ряде случаев отказаться от использования усилителя на выходе моста. Например, при δ0 = 1 мм и Δδ = 0,1 мм чувствительность SД = 1/10'3 = 1000 1/м и относительное изменение сопротивления Δz/z = SД Δδ = 1000 • 10~4 = 0,1, т. е. при изменении зазора на 0,1 мм сопротивление датчика изменяется на 10 %.
Одним из недостатков одинарного индуктивного датчика является то, что на его якорь действует сила притяжения к сердечнику. Эта сила вносит погрешность в работу датчика тем большую, чем меньше перестановочное усилие детали, перемещение которой надо измерить. Индуктивный датчик представляет собой электромагнит, тяговая сила которого,
как известно из (1.20), (1.19)
![]()
Знак минус означает, что сила направлена в сторону, соответствующую уменьшению магнитной энергии. Энергия магнитного поля катушки с током
Анализ уравнения (6.20) показывает, что в рабочем диапазоне входных перемещений при принятых допущениях электромагнитная сила притяжения не зависит от зазора 5. Эта сила пропорциональна квадрату напряжения питания и обратно пропорциональна квадрату частоты питания. Повышение частоты питания снижает силу притяжения, но ухудшает точность работы датчика, поскольку возрастают потери в стали из-за вихревых токов.
Кроме наличия электромагнитной силы притяжения индуктивные датчики имеют также и другие серьезные недостатки: при изменении знака входного сигнала не меняется знак выходного сигнала (т. е. датчик не является реверсивным); диапазон изменения входного сигнала, при котором сохраняется линейность статической характеристики, невелик.
Указанные недостатки ограничивают область применения одинарных индуктивных датчиков. На практике они нашли применение в качестве бесконтактных датчиков положения и концевых выключателей при управлении механизмами, имеющими значительные перестановочные усилия. В таких схемах автоматики наиболее полно проявляются достоинства одинарных индуктивных датчиков: простота конструкции и высокая надежность.