

курсовая работа / 2 РАСЧЕТ ИНТЕГРАЛЬНОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИИ СРП
.doc2 РАСЧЕТ ИНТЕГРАЛЬНОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИИ СРП
ЗАДАНИЕ
Необходимо представить устройство (индуктивный датчик) как систему элементарных звеньев и рассмотрев один из блоков, по заданному дифференциальному уравнению получить его выражение для передаточной функции в распределенных параметрах, выражение для выходной величины, выражение для оценочной передаточной функции для наилучших условий управления. Построить оценочную ЛАЧХ, аппроксимировать ее и записать выражение передаточной функции через типовые звенья.
Дифференциальное уравнение:
![]()
Начальное условие:
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Функция Грина:
![]() ;
;
Нормирующая
функция:
![]()
2.1 ОБЩИЕ СВЕДЕНИЯ ОБ ОСНОВНЫХ ХАРАКТЕРИСТИКАХ СИСТЕМ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
Система с распределенными параметрами (СРП) – это система, в которой практически все сигналы (особенно входной и выходной) зависят от пространственных координат и времени.
Есть среды, которые не могут быть описаны в сосредоточенных параметрах (электромагнитное поле, электростатическое поле, течение потока, гравитационное поле, температура и т.д.).
Система с сосредоточенными параметрами является частным случаем СРП и вводится для упрощения и решения задач на первом (нулевом) этапе.
Основной характеристикой СРП является континуальная передаточная функция. Она показывает отношение выходной функции к входной (по Лапласу) в привязке к конкретной точке.
В искомой задаче выходная функция будет обозначаться буквой Q(x, t), где x – трехмерная переменная в декартовых, цилиндрических или сферических координатах.
f(x,t) – входная координата по среде, зависящая от трехмерной координаты x и времени t.
Основное уравнение задачи записывается в виде:
![]()
где l – так называемый оператор дифференциального уравнения – это формула преобразования выходной величины Q.
В каждой задаче определяются граничные или краевые условия:
![]()
где Г – оператор граничных или краевых условий;
g – входное воздействие на границе в каждый момент времени;
Для того, чтобы решить задачу во всей области координат, необходимо знать ее значения в каждой точке по границе области.
Начальные условия для задачи записываются в виде:
![]()
где N – оператор начальных условий;
Q0 (x) – значение искомой функции в заданный момент времени t0 в каждой точке пространства x.
Получили систему:
Необходимо знать:
-
Значение функции на границе в каждый момент времени.
-
Значение в каждой точке области в момент времени t0.
В указанном виде система практически не разрешима. Вводится в рассмотрение так называемая стандартная форма записи. Она подразумевает нулевые граничные и начальные условия. Ее вид:
где (x, t) – стандартизующая функция.
![]()
Второй функцией является функция Грина (импульсная переходная функция, функция влияния, функция источника, функция веса).
Функцией Грина называется функция источника, которая равна выходному сигналу:
![]() ,
,
при
![]() ,
,
где
![]() -
пространственная
- функция по координатам x,
y, z.
-
пространственная
- функция по координатам x,
y, z.
![]() -
- функция по времени;
-
- функция по времени;
x – координаты входного возмущения;
- координаты точки отклика от удара.
С учетом этого стандартная задача (2) перепишется в виде:
где функция Грина от G(x, t) берется из справочника и является второй основной характеристикой.
Зная эти две характеристики можно найти выходную функцию по следующему выражению:
Если задача статическая, тогда отсутствует уравнение времени t. Бывают задачи, в которых отсутствуют пространственные координаты, т.е. процесс во времени.
Для управления и
синтеза системы управления, исходя из
ТАУ, необходимо знать передаточную
функцию. В теории СРП вводится понятие
так называемой континуальной передаточной
функции, т.е. точечной передаточной
функции, в пределах области D,
когда возмущение подается на среду в
точке x функциями:
![]() и
и
![]() ,
а реакция регистрируется в точке .
,
а реакция регистрируется в точке .
Континуальная передаточная функция выражается следующим образом:
![]() .
.
По сути, континуальная передаточная функция – это преобразование Лапласа функции Грина, т.е. при этих функциях континуальная передаточная функция является производной и всегда может определиться по функции Грина.
Таким образом, для решения задачи по СРП необходимо знать две функции: нормирующую функцию и функцию Грина.
Теория СРП включает структурный метод ТАУ, который подразумевает операции с распределенными блоками:
-
блоки соединяются последовательно;
-
блоки соединяются параллельно;
-
включение второго блока в обратную связь.
В связи с этим вводится понятие операторного изображения выходной величины. В теории распределенных блоков выходная величина определяется следующим образом:
![]() ,
,
где ![]() - изображение по Лапласу выходной
величины решаемой задачи;
- изображение по Лапласу выходной
величины решаемой задачи;
![]() - континуальная
передаточная функция;
- континуальная
передаточная функция;
![]() - изображение по
Лапласу нормирующей функции.
- изображение по
Лапласу нормирующей функции.
Если удается из
нормирующей функции
![]() выделить в явном виде компоненту входной
координаты с помощью специальных средств
или методов
выделить в явном виде компоненту входной
координаты с помощью специальных средств
или методов
![]() ,
,
то уравнение для
![]() перепишется в виде:
перепишется в виде:
![]()
С помощью двух способов (коэффициент разложения и коэффициент приближения) по возможности выносится входное возмущение (по Лапласу) за знак интегрирования, имеем:
![]() .
.
Полученное выражение – отношение изображения по Лапласу выходной величины к изображению по Лапласу входного возмущения, как интеграл по области D континуальных функций, называется интегральной передаточной функцией (функция Власова В.В.).
2.2 ПРЕДСТАВЛЕНИЕ УСТРОЙСТВА КАК СИСТЕМУ ЭЛЕМЕНТАРНЫХ ЗВЕНЬЕВ
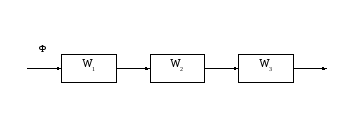
Рисунок 2 – Индуктивный датчик представленный виде системы элементарных звеньев
W1 – сопло, где входным сигналом является поток жидкости скоростью υ, выходной сигнал - υ' (из-за формы сопло, скорость потока жидкости на выходе меняется);
W2 – жидкость внутри сильфона, где ру – давление удара, которое передается через центральное отверстие в перегородке;
W3 – пространство с наружи сильфона, где рс – статическое давление потока, которое передается жидкости во время протекания ее по выходному штуцеру;
2.3 CИНТЕЗ ИНТЕГРАЛЬНОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ДЛЯ
ОБЪЕКТОВ УПРАВЛЕНИЯ
Рассмотрим решения данного дифференциального уравнения для входного сопла W1, на вход которого подается жидкость, характеризующаяся скорость υ [м/сек.], а на выходе имеем скорость υ' [м/сек.].
![]()
Т.к. скорость измеряется в м/с, то возникает необходимость в коэффициенте, стоящем перед первым слагаемым ДУ, который измеряется в cек.
а – коэффициент, измеряемый в сек, а=1 с.
В соответствии с установленными ограничениями размерностей коэффициентов, размерности входного и выходного сигнала совпадают.
Для дальнейшего расчета необходимо провести идентификацию выходной величины Q и входного возмущения f.
Зададим входное
воздействие:
![]() - поток жидкости, протекающий по входному
сопло.
- поток жидкости, протекающий по входному
сопло.
Координаты точки, в которой необходимо отыскать выходную величину Q как функцию отклика на возмущение, ζ изменяется в пределах 0<ζ<L (что соответствует длине сопло), а η – будет изменятся в пределах 0<η<R (ширина сопло).
Q – выходная величина, соответствующая скорости жидкости после протекания ее через сопло.
В соответствии с этими допущениями начальные условия запишутся в виде:
![]()
Тогда нормирующая функция примет вид:
![]()
![]()
Выходная величина записывается в виде:

Подставим выражение
для функции Грина
![]() и нормирующей функции
и нормирующей функции
![]() ,
получим:
,
получим:
![]()
Для определения интегральной передаточной функции необходимо найти операторное выражение выходной величины, которое будет иметь вид:
![]()
![]() ,
,
где ![]() - континуальная передаточная функция;
- континуальная передаточная функция;
![]() - изображение по
Лапласу нормирующей функции.
- изображение по
Лапласу нормирующей функции.
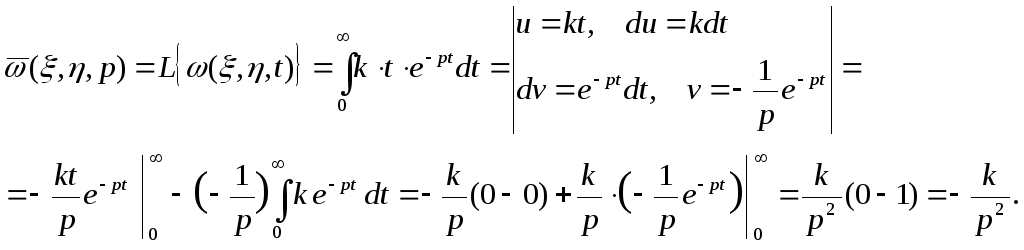
Найдем изображение по Лапласу нормирующей функции:
![]() ,
,
Для дальнейших вычислений необходимо определить континуальную передаточную функцию по формуле:
![]() ,
,
Т.е.:
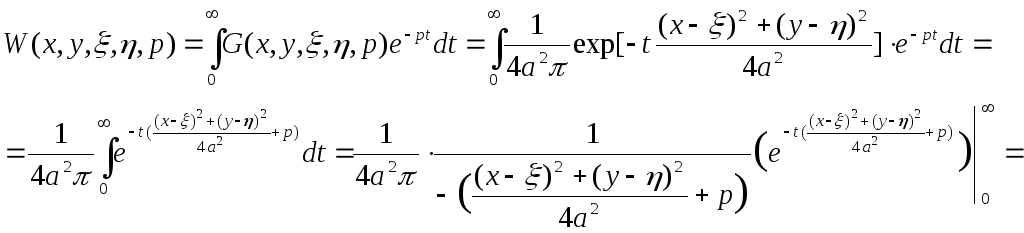
![]()
Таким образом, операторное изображение выходной величины запишется:
![]() .
.
Интегральная передаточная функция записывается в следующем виде:
![]() ,
,
т.к.![]()
![]() ,
,![]() ),
Следовательно:
),
Следовательно:
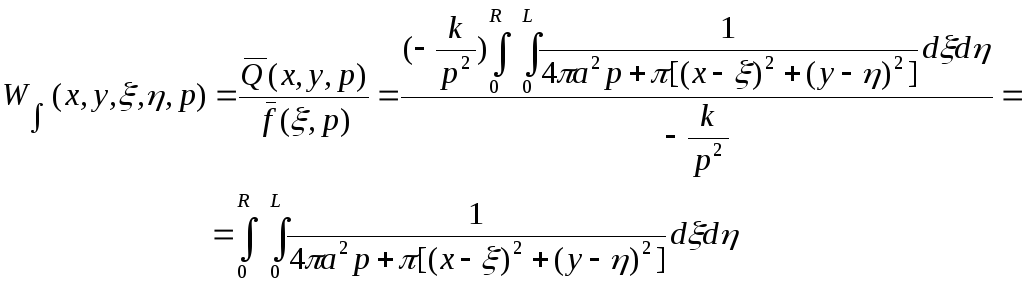
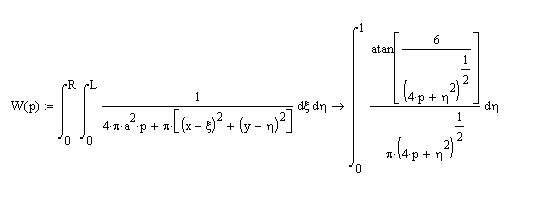
Для конкретного случая переменную ξ ограничим длиной рассматриваемого сопло L=6м, т.е. 0<ζ<6, а переменную η – ограничим шириной данного сопла R=1м (0<η<1). При х=0, у=0 имеем:
![]() .
.
Дальнейшее решение интегральной передаточной функции будем вести с помощью программы Matchcad 2000.
Для того, что бы
решить получившийся интеграл, необходимо
выражение

разложить в ряд
относительно η. Получим:
 Возьмем
интеграл от каждого члена этого ряда в
отдельности.
Возьмем
интеграл от каждого члена этого ряда в
отдельности.
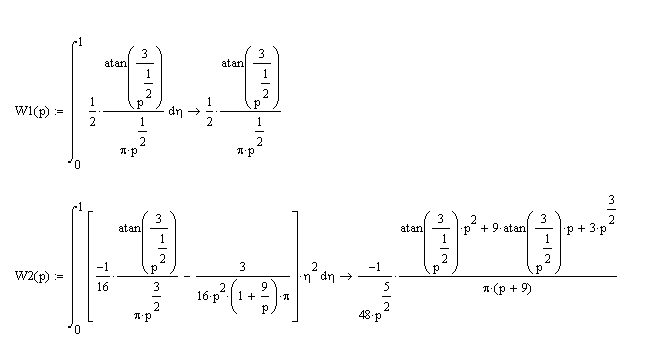
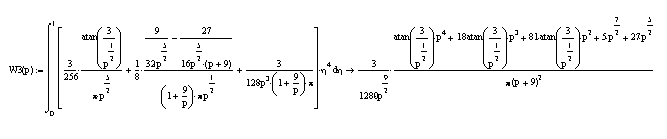
Тогда интегральная передаточная функция принимает вид:

Для построения ЛАЧХ и ФЧХ необходимо перейти от операторной формы записи передаточной функции к передаточной функции, записанной в изображениях по Лапласу. А после получить частотную форму записи передаточной функции, для этого произведем замену р= j.
Выделим в полученном выражение действительную и мнимую части, и воспользуемся следующими формами для нахождения ЛАЧХ и ЛФЧХ:
![]() ;
;
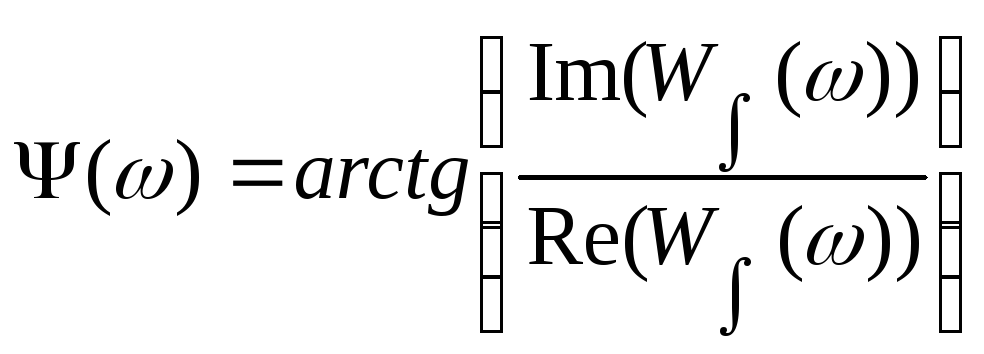 .
.
При проведении аппроксимации определим сопрягающиеся частоты.
ω = 1 → T = 1/ω = 1.
20lg k =-14 , откуда k = 10 (-14 / 20) = 0,1995 – статический коэффициент передачи.
С помощью аппроксимации передаточная функция запишется в виде:
![]()
В результате аппроксимации получили произведение интегрирующего и апериодическое звено первого порядка.