

Содержание
Введение 3
1 Назначение, принцип действия, конструкция ЭМП 4
2 Динамика ЭМП 7
3 Представление устройства в виде структурной схемы 10
4 Общие сведения об основных характеристиках СРП 12
5 Синтез интегральной передаточной функции СРП 16
Заключение 20
Список использованной литературы 21
Введение
Есть среды, которые не могут быть описаны в сосредоточенных параметрах (электромагнитное поле, электростатическое поле, течение потока, гравитационное поле, температура и т.д.). Система с распределенными параметрами (СРП) - это система, в которой практически все сигналы (особенно входной и выходной) зависят от пространственных координат и времени. Система с сосредоточенными параметрами является частным случаем СРП и вводится для упрощения и решения задач на первом (нулевом) этапе.
Цель курсовой работы - синтез интегральной передаточной функции для объектов управления с распределенными параметрами. В данной работе решается вопрос построения математической модели элемента электромагнитного преобразователя (ЭМП).
1 Назначение, конструкция, принцип действия
Электромагнитный преобразователь (ЭМП) – типовой элемент автоматики, преобразующий электрические сигналы в соответствующие механические перемещения. ЭМП в основном предназначены для управления электрогидравлическими и электропневматическими распределительными (усилительными) устройствами.
ЭМП классифицируют на поступательного и поворотного действия. ЭМП поступательного действия осуществляют линейное перемещение механической нагрузки (плунжера золотникового распределителя или заслонки усилителя типа сопло-заслонка), а ЭМП поворотного типа предназначены для углового поворота механической нагрузки.
Принцип действия ЭМП основан на взаимодействии ферромагнитных тел с магнитным полем, создаваемым управляющим электрическим сигналом.
Конструкция нейтрального ЭМП поступательного действия, работающего на постоянном токе, показана на рисунке 1.
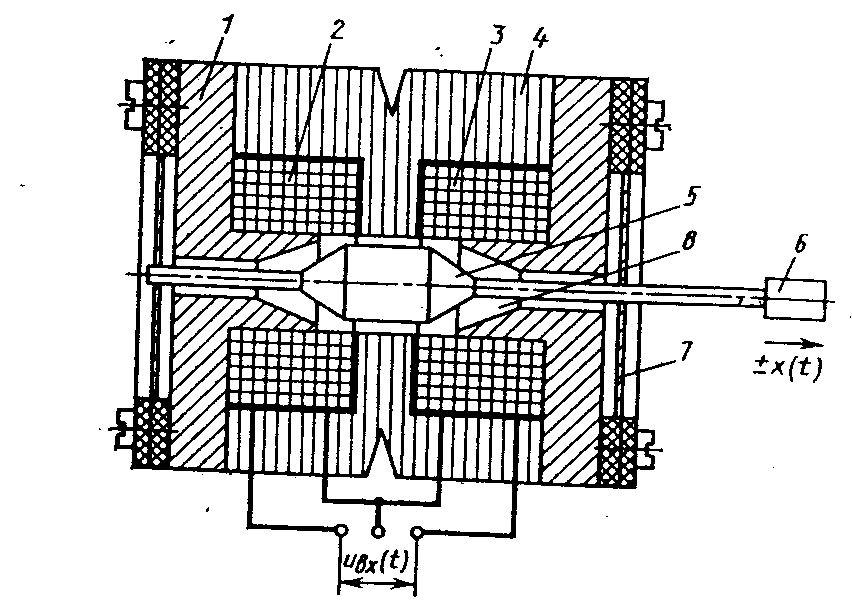
Рисунок №1 - Конструкция нейтрального ЭМП поступательного действия
Две обмотки управления 2 и 3, имеющие одинаковое число витков, включены по дифференциальной схеме и установлены во внутреннем пространстве цилиндрического магнитопровода 4, который закреплён в корпусе 1. Подвижный элемент ЭМП – якорь 5 имеет небольшую массу. При помощи двухстороннего штока 6 его крепят к плоским пружинам 7. Зазоры 8 между коническими срезами якоря и коническими полюсными наконечниками магнитопровода являются рабочими, а зазор между цилиндрической поверхностью якоря и цилиндрической поверхностью полюса магнитопровода – паразитным. Входным сигналом ЭМП является разность токов в его обмотках, а выходным сигналом – линейное перемещение якоря x(t).
При обесточенных обмотках управления якорь удерживается в нейтральном положении (по отношению к коническим полюсам магнитопровода) положении двумя плоскими уравновешивающими пружинами, имеющие линейную зависимость прогиба от приложенного усилия. При равных токах в обмотках управления, то есть при нулевом входном сигнале Uвх(t), возникают два магнитных потока, направленные противоположно. Проходя по магнитопроводу, якорю, паразитному и рабочему зазорам, эти магнитные потоки образуют два замкнутых контура. Под действием магнитных потоков в рабочих зазорах на конических поверхностях магнитопровода и якоря силы взаимного притяжения. Силы, возникающие в паразитном зазоре на цилиндрических поверхностях магнитопровода и якоря, осевого воздействия не оказывают. При одинаковых токах в обмотках управления, числе витков и величинах рабочих зазоров усилия на концах якоря будут одинаковыми и направлены в противоположные стороны. При этом результирующее усилие будет равно нулю.
Входной сигнал в виде разности токов в катушках управления вызывает появление двух различных по величине магнитных потоков и, следовательно, различных усилий на концах якоря. В этом случае создаётся неуравновешенное результирующее усилие, под действие которого якорь смещается в сторону контура, обтекаемого большим током. Перемещению якоря противодействуют плоские пружины, их деформация создаёт силу, пропорциональную перемещению якоря. Движение не груженного якоря происходит до тех пор, пока электромагнитные силы не будут уравновешенны усилием плоских пружин. При этом наступает состояние механического равновесия и якорь занимает новое положение, отличающееся от среднего. Направление движения якоря зависит от того, в какой катушке управления возникает больший магнитный поток, а величина перемещения пропорциональна величине входного сигнала Uвх(t).