

 -
-
Введение
Под моделированием понимается процесс замещения реального объекта некоторой моделью, позволяющей проводить над ней определённые исследования. В зависимости от уровня абстрагирования выделяют три иерархических уровня: микро-, макро- и мегауровень. Цель курсовой работы – моделирование некоторых физических процессов на микро- и макроуровнях.
Под моделированием на микроуровне понимается также теория систем с распределёнными параметрами. Есть среды, которые не могут быть описаны в сосредоточенных параметрах (электромагнитное поле, электростатическое поле, течение потока, гравитационное поле, температура и т.д.). Система с распределенными параметрами (СРП) - это система, в которой практически все сигналы (особенно входной и выходной) зависят от пространственных координат и времени. Система с сосредоточенными параметрами является частным случаем СРП и вводится для упрощения и решения задач на первом (нулевом) этапе. Математически СРП описываются дифференциальными уравнениями в частных производных с начальными и граничными условиями, составляющими краевую задачу. Для её решения в статике и динамике используется функция Грина, являющаяся решением краевой задачи при воздействии на неё дельта-функции и нулевых начальных и граничных условиях, а также континуальная передаточная функция, являющаяся преобразованной по Лапласу функцией Грина. В данной работе при моделировании на микроуровне решается вопрос построения математической модели диска, закрепленного по краям.
На макроуровне исследуется гидравлическая система. При разработке и исследовании модели макроуровня необходимо выполнить: синтез моделей в графической и матричной формах, в виде системы обыкновенных дифференциальных уравнений, а также анализ полученной математической модели в статическом и динамическом режимах.
1 МОДЕЛИРОВАНИЕ НА МИКРОУРОВНЕ
1.1 Исходные данные
Есть среды, которые не могут быть описаны в сосредоточенных параметрах (электромагнитное поле, электростатическое поле, течение потока, гравитационное поле, температура и так далее), поэтому они рассматриваются как системы с распределёнными параметрами (СРП).
Конечной задачей решения уравнения СРП является нахождения выходной распределённой величины Q(x,t) в любой момент времени t>0 в любой пространственной точке х.
Рассмотрим одномерную задачу — колебание струны, которое может быть описано уравнением гиперболического типа:
![]()
где f(x,t) - входная координата, зависящая от координаты х и времени t, для которого формируются следующие условия:
1) Начальные условия:
![]()
![]()
2) Граничные условия:
![]()
![]()
![]() ,
,
![]() ,
,
![]()
![]()
Стандартизирующая функция, компенсирующая влияние начальных и граничных условий для данной задачи имеет вид:
![]()
Функция Грина, являющаяся решением краевой задачи при нулевых граничных условиях и входном воздействии в виде δ-функции имеет вид:

Континуальная передаточная функция, являющаяся преобразованием Лапласа функции Грина имеет вид:
![]()
где λк – положительные корни следующего уравнения:
![]()
![]()
![]()
1.2 Идентификация краевой задачи
Для решения частной задачи примем следующие условия:
– входное
возмущение
![]()
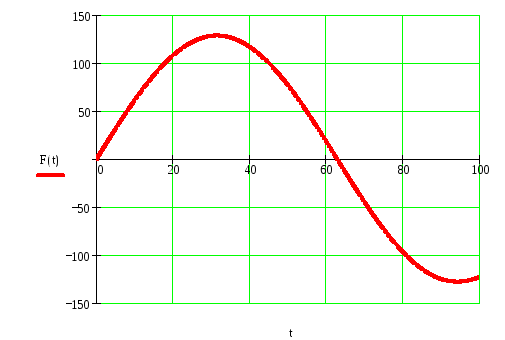


Рисунок 1 – Входное возмущение
– начальные
условия, описывающие положение струны
в начальный момент времени
![]() ,
,
![]()
– граничные условия, описывающие колебание струны на концах стержня
![]() ,
,
![]()
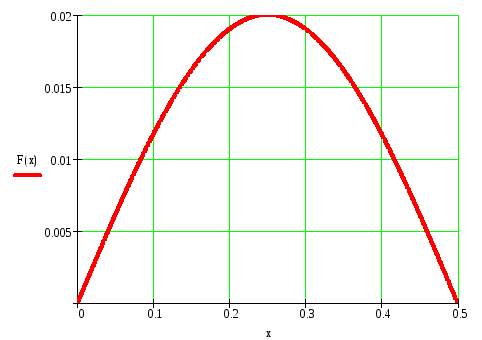


Рисунок 2 – Начальные условия
Найдем
корни уравнения
![]() графически.
графически.
Примем
![]() ,
,
![]() ,
,
![]()
![]()
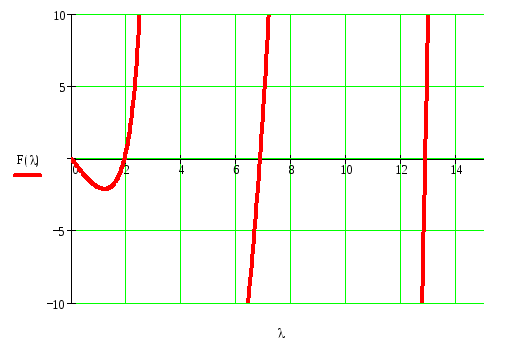


Рисунок
3 – График функции
![]()
![]()
![]()
![]()
Рассчитаем размерность для f(x,t):
![]() ,
,
где p – давление на струну, [Н/м2];
ρ – плотность материала струны, [кг/м3];
![]() –
длина
струны, [м].
–
длина
струны, [м].
Тогда:
 .
.
Рассчитаем размерность для а:
![]() ,
,
где T – натяжение струны, [Н/м2];
ρ – плотность материала струны, [кг/м3].
Тогда:
![]() .
.
Примем, что:
– а
= 10
![]() – волновая скорость струны;
– волновая скорость струны;
– l = 0,5 [м] – длина струны;
– материал струны – сталь;
– ρ
= 7.8 · 103
![]() – плотность стали.
– плотность стали.
С учётом входного воздействия, принятых начальных и граничных условий стандартизирующая функция примет вид:
![]()
где
![]() –
импульсная переменная функция.
–
импульсная переменная функция.