

Глава 8. Радиовысотомеры
На самолетах в качестве приборов, измеряющих высоту полета, сигнализаторов опасной и заданной высот применяются радиовысотомеры.
Радиовысотомеры служат для измерения истинной высоты полета. В зависимости от разрешающей способности они подразделяются на высотомеры малых высот и высотомеры больших высот.
Радиовысотомеры малых высот используются в основном при посадке и устанавливаются на всех типах самолетов.
Радиовысотомеры больших высот применяются при аэрофотосъемке и полетах на больших высотах, вне эшелона.
Принцип действия всех высотомеров основан на измерении времени запаздывания в приходе отраженного от земной поверхности сигнала относительно момента излучения прямого (зондирующего) сигнала.
Радиовысотомер малых высот
радиовысотомер малых высот работает в режиме непрерывного излучения модулированных по частоте электромагнитных колебаний. Генератор СВЧ генерирует незатухающие колебания, частота которых fпр изменяется по пилообразному закону (рис.30).
Эти
колебания излучаются через передающую
антенну по направлению к земле. Отразившись
от ее поверхности, колебания fотр
поступают в приемное устройство, на
балансный детектор. На другой вход этого
детектора поступает зондирующий (прямой)
сигнал. За время
![]() ,
необходимое для приема отраженного
сигнала, частота генератора прямого
сигнала, изменяющаяся по пилообразному
закону, изменит свое значение, в балансном
детекторе будет выделена разностная
частота f
= fпр
- fотр,
пропорциональная запаздыванию отраженного
сигнала t.
После усиления эта разностная частота
поступает на счетчик частоты, который
создает на выходе постоянное напряжение,
пропорциональное истинной высоте
полета.
,
необходимое для приема отраженного
сигнала, частота генератора прямого
сигнала, изменяющаяся по пилообразному
закону, изменит свое значение, в балансном
детекторе будет выделена разностная
частота f
= fпр
- fотр,
пропорциональная запаздыванию отраженного
сигнала t.
После усиления эта разностная частота
поступает на счетчик частоты, который
создает на выходе постоянное напряжение,
пропорциональное истинной высоте
полета.
Радиовысотомер РВ-5
Радиовысотомер РВ-5 является частотным высотомером малых высот. Радиовысотомер выдает экипажу и в САУ, а при необходимости и в другие бортовые системы, следующие данные:
-
о текущей высоте в виде постоянного напряжения положительной полярности, значение которого пропорционально высоте полета;
-
о пролете летательным аппаратом заранее заданной опасной высоте;
-
о полете ниже опасной высоты;
-
об исправной работе РВ-5 и его отказе.
Поскольку в частотных высотомерах мерой частоты является разностная частота, получаемая на выходе балансного детектора в результате алгебраического сложения прямого и отраженного сигналов (f = fпр - fотр), то и точность измерения высоты зависит от параметров сигнала этой частоты.
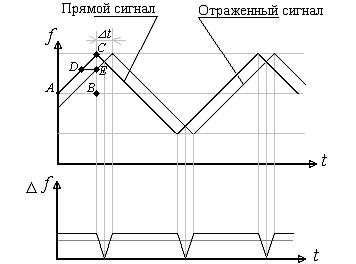
Рис. 30. График изменения частот радиовысотомера РВ-5
Чтобы
установить взаимосвязь разностной
частоты с высотой полета, рассмотрим
приведенные на рис. 30 подобные
треуголь-ники АВС и DEC.
Из их подобия следует, что
![]() .
Из рисунка видно, что
.
Из рисунка видно, что
СЕ
= f;
DE = t;
BC = Fдев;
АВ
=
![]() =
=
![]() ,
,
где f – разностная частота РВ; Fдев - девиация частоты РВ;
Т - период частоты модуляции; Fm - частота модуляции.
Подставив эти выражения в пропорцию подобия, получим:
 .
.
Выражения для разностной частоты будет иметь вид:
![]() .
.
Но
так как
![]() ,
окончательно получим:
,
окончательно получим:
![]() ,
,
где Н – высота в метрах, c – скорость света (3108 м/c).
Таким образом, разностная частота имеет прямо пропорциональную зависимость от высоты полета.
Сомножитель
![]() называют обычно постоянной высотомера
А;
называют обычно постоянной высотомера
А;
![]()
Постоянная высотомера показывает, на сколько герц изменится разностная частота при изменении высоты на один метр.
Для высотомера РВ-5 постоянная А равна 200 Гц/м. Разностная частота при измерении максимальной высоты 750 м будет равна 150 кГц.
Данное
равенство является приближенным, оно
будет точным только при таких высотах,
при которых
![]() - целое число. При этом шаг устойчиво
измеряемых высот равен
- целое число. При этом шаг устойчиво
измеряемых высот равен
![]() .
.
Для
высотомера РВ-5 при А
= 200 Гц/м и
![]() =150
Гц получим шаг устойчиво измеряемых
высот
=150
Гц получим шаг устойчиво измеряемых
высот
![]() м.
м.
Следовательно,
устойчиво измеряемые высоты чередуются
для высотомера РВ-5 через 0,75 м. Внутри
этого интервала показания высоты будут
неустойчивыми. При плавном изменении
частоты значения высоты могут несколько
раз измениться на величину Н.
Это явление характеризует постоянную
ошибку радиовысотомера, которая особенно
опасна на последнем участке посадки,
так как соизмерима с измеряемой высотой.
Минимальная устойчиво измеряемая высота
![]() .
.
Это
значение можно считать удовлетворительным
при визуальной посадке. Для автоматической
посадки необходимо уменьшить величины
![]() и
и
![]() .
.
Для
этого в радиовысотомерах последних
разработок (РВ-5М, РВ-21 и др.) применен
метод одновременной модуляции по частоте
двумя модуляционными частотами
![]() и
и
![]() ,
причем
,
причем
![]() в
несколько раз (3 – 6) выше, чем
в
несколько раз (3 – 6) выше, чем
![]() .
.
При
модуляции двумя частотами в спектре
разностной часто-ты будут существовать
гармоники этих частот. Если при измере-нии
высоты показания РВ будут неустойчивы
по частоте
![]() ,
то устойчивость будет обеспечиваться
гармониками частоты
,
то устойчивость будет обеспечиваться
гармониками частоты
![]() .
Интервал между гармониками
.
Интервал между гармониками
![]() будет во столько раз меньше, во сколько
раз частота
будет во столько раз меньше, во сколько
раз частота
![]() меньше
меньше
![]() .
Соотношение частот модуля-ции показывает,
во сколько раз уменьшается ошибка
измерения высоты при использовании
двойной модуляции по сравнению с
использованием одночастотной модуляции.
.
Соотношение частот модуля-ции показывает,
во сколько раз уменьшается ошибка
измерения высоты при использовании
двойной модуляции по сравнению с
использованием одночастотной модуляции.
Для
высотомера РВ-5М
![]() =
150 Гц,
=
150 Гц,
![]() =25
Гц. Если в выражение
=25
Гц. Если в выражение
![]() вставить значение
вставить значение
![]() =25
Гц, получим
=25
Гц, получим
![]() 0,125
м, а
0,125
м, а
![]() =
0,375 м.
=
0,375 м.
К значительным ошибкам в измерении высоты может привести нестабильность значений девиации частоты и частоты модуляции, что обычно приводит к значительным отклонениям постоянной высотомера А от расчетной. В радиовысотомере РВ-5 имеется специальное встроенное устройство, осуществляющее непрерывный контроль за величиной постоянной А, автоматичес-кую ее подстройку и поддержание в заданных пределах с помощью регулировки полосы частотной модуляции.
Кроме этого, в высотомере имеется устройство встроенного тест-контроля, позволяющего проверить его калибровку и общую работоспособность в воздухе и на земле путем подачи сигнала в линию задержки с эквивалентной высотой 15 м.
ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ДАННЫЕ ВЫСОТОМЕРА РВ-5
|
Диапазон измеряемых высот |
0 – 750 м |
|
Погрешность измерения высоты: |
|
|
По выходу в САУ на высотах |
|
|
от 0 до 10 м |
0,6 м |
|
от 10 до 750 м |
6 % Н |
|
По указателю высоты на высотах |
|
|
от 0 до 10 м |
0,8 м |
|
от 10 до 750 м |
8 % Н |
|
Постоянная времени (запаздывание) |
|
|
По автоматическому выходу |
0,1 с |
|
По указателю высоты |
0,5 с |
|
Погрешность сигнализации опасной высоты (относительно показаний указателя) на высотах |
|
|
от 0 до 10 м |
0,5 м |
|
от 10 до 750 м |
5 % Н |
|
Чувствительность |
90 дБ |
|
Диапазон частот передатчика |
4200 – 4400 МГц |
|
Частота основной модуляции |
150 Гц |
|
Частота дополнительной модуляции |
25 Гц |
|
Полоса модуляции |
100 МГц |
|
Выходная мощность передатчика |
0,4 Вт |
|
Потребляемая мощность по сети 115 В 400 Гц |
100 ВА |
|
Потребляемая мощность по сети +27 В |
10 Вт |
|
Масса приемопередатчика с указателем высоты |
10 кг |
Радиовысотомер больших высот
С целью повышения относительной точности в радиовысотомерах больших высот используется импульсный метод измерения истинной высоты полета.
Рассмотрим высотомер больших высот РВ-18, позволяющий измерять высоты полета в пределах от 500 до 30 000 м с погрешностью 25 м 0,15% от фактической высоты полета. Структурная схема представлена на рис. 31.
Генератор
запуска, синхронизирующий работу
высотомера, вырабатывает прямоугольные
импульсы с периодом
![]() (рис.32,а),
которые запускают передатчик и генератор
«быстрой» пилы. Генерируемые передатчиком
высокочастотные колебания излучаются
передающей антенной в направлении
подстилающей поверхности Земли.
Отраженные сигналы принимаются приемным
устройством и после обработки поступают
в блок электронного сопровождения.
(рис.32,а),
которые запускают передатчик и генератор
«быстрой» пилы. Генерируемые передатчиком
высокочастотные колебания излучаются
передающей антенной в направлении
подстилающей поверхности Земли.
Отраженные сигналы принимаются приемным
устройством и после обработки поступают
в блок электронного сопровождения.
Р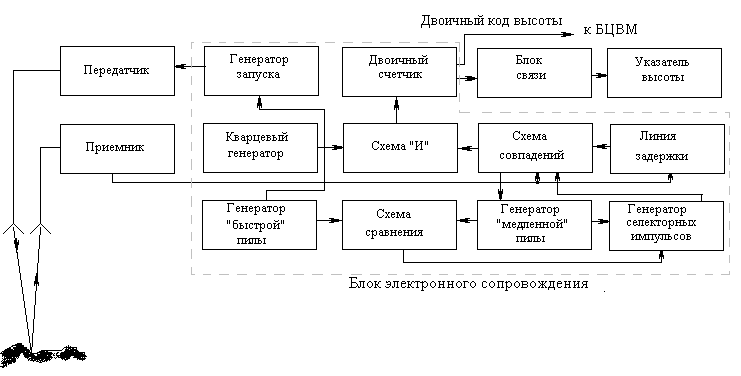 ис.31.
Структурная схема радиовысотомера
РВ-18
ис.31.
Структурная схема радиовысотомера
РВ-18
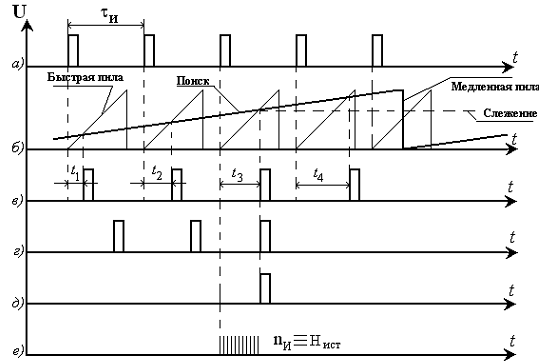
Рис.32. Временные диаграммы напряжений в высотомере РВ-18
В режиме поиска отраженного сигнала импульсы, вырабатываемые генератором «быстрой» пилы, поступают в схему сравнения. Туда же поступает линейно возрастающее напряжение из генератора «медленной» пилы (рис.32,б). В момент, когда величина этих сигналов совпадает, происходит срабатывание схемы сравнения и ее выходной сигнал запускает генератор селекторных импульсов. Селекторный импульс (рис. 32,в) оказы-вается задержанным относительно импульса передатчика (генератора запуска) на время, пропорциональное напряжению «медленной» пилы в данный момент. Поскольку напряжение «медленной» пилы плавно возрастает, задержка селекторного импульса от периода к периоду также плавно возрастает и селекторный импульс перемещается в диапазоне времени, соответствующем высотам от 450 до 30 000 м. Если в диапазоне поиска отсутствует отраженный сигнал, поиск начинается сначала.
В тот момент времени, когда в схеме совпадения селекторный импульс совпадает с отраженным от земли импульсом (рис. 32,г), наступает режим ИЗМЕРЕНИЕ. Импульс совпадения (поисковый импульс) (рис. 32,д) поступает со схемы совпадения на схему «И», на которую также подаются высокостабильные счетные импульсы от кварцевого генератора. Поисковый импульс останавливает прохождение счетных импульсов через схему совпадения, и счетчик фиксирует их количество nи, соответствую-щее измеренной высоте Нист (рис. 32, е).
Наличие на выходе высотомера в виде двоичного кода позволяет использовать его для работы в пилотажно-навигаци-онном комплексе самолета.
Система встроенного контроля позволяет проверить исправность и работоспособность радиовысотомера путем подачи в режиме КОНТРОЛЬ на вход приемника задержанного на фиксированную величину ослабленного сигнала передатчика.