

1.Непрерывно-детермин-ные (н-д) модели (d-схемы)
Рассмотрим н-д подход на примере дифференциальных уравнений. Дифференциальными уравнениями называются такие уравнения в которых неизвестными является функция одной или нескольких переменных, причем в уравнения входят не только функции но и их производные.
Общий вид д.у.: y = f(y,t), t – неизвестная величина (время)
Рассмотрим две формализации процесса функционирования двух систем различной физической природы: механической и электрической.
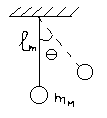
1. Колебания маятника.
При малых отклонениях колебания маятника можно описать уравнением:
mм lм2 (d2θ/dt2) +mм lм g θ(t) = 0
где mм , lм – масса и длина маятника, g=9,8
2. Колебательный контур
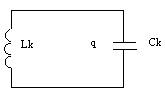
Lк (d2q/dt2) + q(t)/Cк = 0
где Lк – индуктивность катушки, q, Cк – заряд и емкость конденсатора.
Обозначим: 1 2
h0 = mм lм2 ; h0 = Lк
h1 = 0 ; h1 = 0
h2= mм lм g ; h2 = 1/Cк
z(t) = θ(t) ; z(t) = q(t)
Получим: h0 z”(t) + h1 z’(t) + h2 z(t) = 0
Если на систему действует внешнее воздействие x(t), то уравнение будет иметь вид:
h0 z”(t) + h1 z’(t) + h2 z(t) = x(t).
В первом случае x(t) – внешняя сила, приложенная к маятнику, во втором случае x(t) – источник энергии; z(t) – состояние системы (выходная величина).
С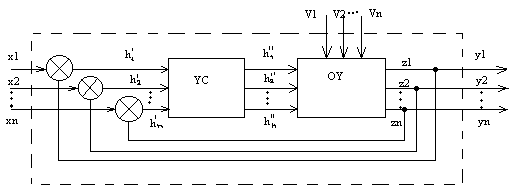 помощьюD-схем
описывают также САУ. В этом случае
реальный объект представляется в виде
двух систем: управляющей системы и
управляемой.
помощьюD-схем
описывают также САУ. В этом случае
реальный объект представляется в виде
двух систем: управляющей системы и
управляемой.
x(t) – вектор входных воздействий,
h’(t) – сигнал рассогласования,
h”(t) – вектор управляющих воздействий,
V(t) – вектор возмущающих воздействий,
Z(t) – вектор состояния системы,
Y(t) – вектор выходных переменных.
Задачей САУ является изменение выходной величины согласно заданному закону функционирования с зад. точностью. При проектировании и эксплуатации САУ необходимо выбрать такие параметры системы, которые обеспечивали бы зад. точность и устойчивость системы.
2. Дискретно-детерминированные
(д-д) модели (F-схемы).
Д-д модели в своей основе содержат теорию автоматов. На основе этой теории система представляется в виде автомата, перерабатывающего дискретную информацию и меняющего свое внутреннее состояние лишь в допустимые момент времени. Автомат можно представить в виде черного ящика, на кот. подаются входные воздействия и снимаются выходные и кот. может иметь множество внутренних состояний.
Автомат, у кот. множество входных переменных и множество внутренних состояний, а следовательно и множество выходных состояний конечно называется конечным автоматом.
Автомат F можно описать множеством входных, выходных, внутренних состояний, начальным значением z0, функцией переходов φ и функцией выходов ψ: F = < X, Y, Z, z0, φ, ψ >.
Функция перехода φ определяет состояние z’, в кот. перейдет система если она находилась в состоянии Z и на ее вход поступило входное воздействие X: z' = φ(z, x).
Функция выхода ψ определяет выходное значение Y, кот. принимает система, если она находилась в состоянии Z и на ее вход поступил сигнал X: y = ψ(z, x).
Для задания автомата используется табличный или графический способ. При табличном способе в строках записываются входные воздействия автомата X, а в столбцах – состояния Z.
z0 z1 z2 z3
|
x\z |
0 |
1 |
2 |
3 |
|
x1 |
1 |
2 |
3 |
0 |
|
x2 |
2 |
3 |
0 |
0 |
|
x3 |
3 |
0 |
0 |
0 |
На пересечении i-той строки и j-того столбца ставится значение функции перехода.
При графической форме записи каждому состоянию соответствует отдельная вершина.