

Способы задания автоматов
Существует несколько способов задания F автоматов, но наиболее часто используется табличный, графический и матричный способы.
Табличный способ основан на использовании таблиц переходов и выходов, строки которых соответствуют входным сигналам автомата, а столбцы – его состояние.
Пример автомата Мили.
|
Xi |
ZK | ||||
|
Z0 |
Z1 |
Z2 |
… |
ZK | |
|
|
Переходы Z(t+1) | ||||
|
X1 |
φ(Z0, X1) |
φ(Z1, X1) |
φ(Z2, X1) |
… |
|
|
X2 |
φ(Z0, X2) |
φ(Z1, X2) |
φ(Z2, X2) |
… |
|
|
. . . |
|
|
|
|
|
|
|
Выходы | ||||
|
X1 |
Ψ(Z0, X1) |
Ψ(Z1, X1) |
Ψ(Z2, X1) |
… |
|
|
X2 |
Ψ(Z0, X2) |
Ψ(Z1, X2) |
Ψ(Z2, X2) |
… |
|
|
. . . |
|
|
|
|
|
|
Xi |
ZK | |||
|
Z0 |
Z1 |
Z2 | ||
|
|
Переходы | |||
|
X1 |
Z2 |
Z0 |
Z0 | |
|
X2 |
Z0 |
Z2 |
Z1 | |
|
|
Выходы | |||
|
X1 |
y1 |
y1 |
y2 | |
|
X2 |
y1 |
y2 |
y1 | |

![]() ,
,
![]() ,
,
![]() .
.
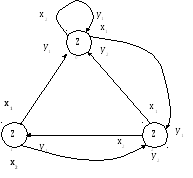
При другом способе задания автомата используется понятие направленного графа.
Граф автомата представляет собой набор вершин, соответствующие различным состояниям автомата и соединяющих вершины дуг графа, соответствующие тем или другим переходам автомата.
При матричном
задание конечного автомата записывается
квадратная матрица
![]() ,
строки которой соответствуют исходным
состоянием, а столбцы состоянием
перехода. Элемент
,
строки которой соответствуют исходным
состоянием, а столбцы состоянием
перехода. Элемент![]() ,
стоящий на пересеченииi-той
строки и j-того
столбца в случае автомата Мили
соответствует входному сигналу ХК,
вызывающему переход из состояния Zi
в состояние Zj
и выдаваемые
при этом в переходе.
,
стоящий на пересеченииi-той
строки и j-того
столбца в случае автомата Мили
соответствует входному сигналу ХК,
вызывающему переход из состояния Zi
в состояние Zj
и выдаваемые
при этом в переходе.
Пример: для нашего случае.
 .
.
Дискретно стохастические модели
Или Р-схемы описываются с помощью вероятностных автоматах (probabilistic automat).
В общем, виде вероятностный автомат можно определить преобразователь с памятью, функционирование которого в каждом такте зависит только от состояния памяти в нем и может быть записана статическими.
Введем понятие Р-автомата.
G – множество пар (хi, ZS), где хi - элементы входного множества х;
ZS – элементы подмножеств S;
Y – выходное подмножество;
В – подмножество вероятности переходов в состояние ZK и появления на выходе yj, если автомат был в состоянии ZS и на вход поступил сигнал xi.
![]() .
.
Тогда схема Р,
описывающая все перечисленные подмножества
![]() ,
называется вероятностным автоматом.
,
называется вероятностным автоматом.
Как и в случае F-схемы существуют Р автоматы Мили и Мура.
Частотным случаем Р-автомата являются автоматы, у которых переход либо в новое состояние, либо выходной сигнал определяются детерминированием.
В первом случае автомат носит название Z- детерминированный вероятностным автоматом, во втором случае Y- детерминированный Р-автомат.
Для оценки различных характеристик исследуемых систем представляемых в виде Р-схем используются как аналитические модели, основанные на теории Марковских цепей, так и имитационные модели это метод статического моделирования.
Лекция № 5