

Эквивалентные схемы вращательных механических систем.
В таких схемах базовый узел, как правило, соответствует неподвижной (невращающейся) части объекта. Ветвь, изображающая момент инерции, включается между базовым узлом и узлом, через который осуществляется взаимодействие тела с данным моментом инерции с телами, находящимися с ним на одной оси вращения.
Пример модели муфты сцепления автомобиля.
Примером, когда ветвь типа R включается между двумя небазовыми узлами, может служить эквивалентная схема муфты сцепления автомобиля, составленная для вращательного движения (рис. 6, б). На рис. 6, а схематично изображена муфта сцепления.

Рис. 6. Схематичное изображение муфты сцепления (а) и ее эквивалентная схема (б).
На
рис. 6 М1
- момент на входном валу; М2
- нагрузка на выходном валу муфты; R1
и R2
- коэффициенты трения в подшипниках; L1
и L2
- крутильные гибкости валов;
![]() и
и![]() - моменты инерции ведущего и ведомого
дисков муфты;
- моменты инерции ведущего и ведомого
дисков муфты;![]() - коэффициент трения между дисками
сцепления.
- коэффициент трения между дисками
сцепления.
При составлении эквивалентных схем вращательных механических систем особое внимание следует обратить на направление источников моментов и скоростей. На рис. 7, а представлен случай, когда моменты М1 и М2 противодействуют друг другу, а на рис. 7. б - случай, когда моменты М1 и М2 действуют в одном направлении.

Рис. 7. Схемы встречного включения источников момента (а) и согласного включения источников момента (б).
Примечание. Аналогичное замечание справедливо и для источников силы в механических поступательных подсистемах.
Эквивалентные схемы гидравлических (пневматических) подсистем.
За базовый узел при составлении эквивалентных схем таких подсистем обычно принимается внешняя среда.
Примечание. Гидравлическая и пневматическая подсистемы аналогичны.
Резервуары изображаются на эквивалентных схемах гидравлических подсистем емкостями, которые одним полюсом подключаются к базовому узлу, через другой полюс осуществляется взаимодействие этой емкости с трубопроводами и другими гидравлическими элементами. Трубопровод на эквивалентной схеме изображается гидравлическими сопротивлением и индуктивностью, включенными последовательно, но может быть отображен и только ветвью типа R, если пренебречь инерционностью жидкости.
Пример фрагмента гидравлической подсистемы.
На рис. 8, а представлен фрагмент гидравлической подсистемы, а на рис. 8, б - его эквивалентная схема.
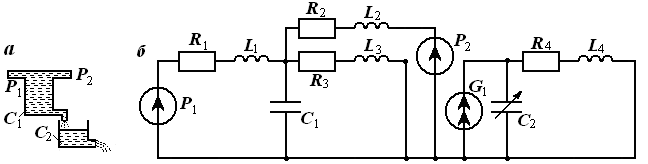
Рис. 8. Пример гидравлической подсистемы (а) и ее эквивалентная схема (б).
В
узлах схемы определяются давления,
расходы распределены по ветвям.
Трубопроводы отображены гидравлическими
сопротивлениями R1,
..., R4
и гидравлическими индуктивностями L1,
…, L4,
Р1
и Р2
- источники давлений; C1
- гидравлическая емкость; зависимый
источник расхода G1
равен расходу через элементы R3
и L3,
переменная гидравлическая емкость С2
определяется через заполненность
сосуда, т.е.
![]() .
.
Эквивалентные схемы тепловых подсистем.
Если в MM элементов используются значения температур, то за базовый узел в таких подсистемах может приниматься условное тело с температурой 0 К или 0°С или, если в MМ используются только разности температур, произвольная точка подсистемы. В узлах эквивалентной схемы определяются либо абсолютные температуры, либо перегрев относительно базового узла; тепловые потоки распределяются по ветвям схемы.
Эквивалентные схемы электрических подсистем.
Эквивалентные схемы таких подсистем практически совпадают с их принципиальными схемами, заменяются только сложные радиокомпоненты их схемами замещения, а также могут быть учтены «паразитные» элементы монтажа.
Под схемой замещения понимается эквивалентная схема сложного радиокомпонента, составленная из двухполюсников.
На рис. 9, а представлена схема двухкаскадного усилителя, а на рис. 9, б - его эквивалентная схема. Элементы, обведенные пунктирной линией, входят в эквивалентные схемы замещения транзистора.

Рис. 9. Принципиальная схема усилителя (а) и его эквивалентная схема (б).