

§8. Реалізація під-закону регулювання з не коливальною баластною ланкою.
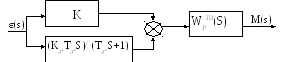
В основу такого ПІД-регулятора покладений ПІ-регулятор з не коливальною баластною ланкою, на його вхід подається сигнал розлагодження ε(s), та його похідна покажемо, що ця структура формує ПІД-закон регулювання:
Для цього запишемо еквівалентну передаточну функцію:
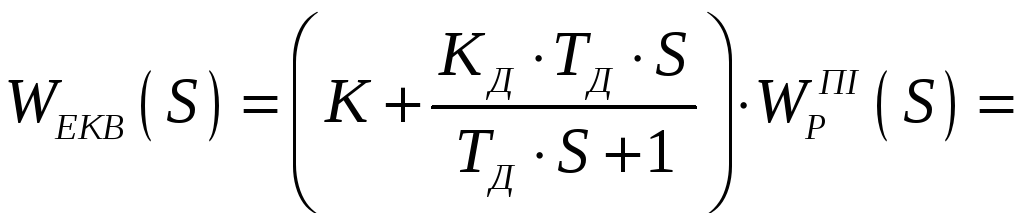 замість
реального ПІ-регулятора пишемо ідеальну
передаточну функцію і баластну ланку
замість
реального ПІ-регулятора пишемо ідеальну
передаточну функцію і баластну ланку

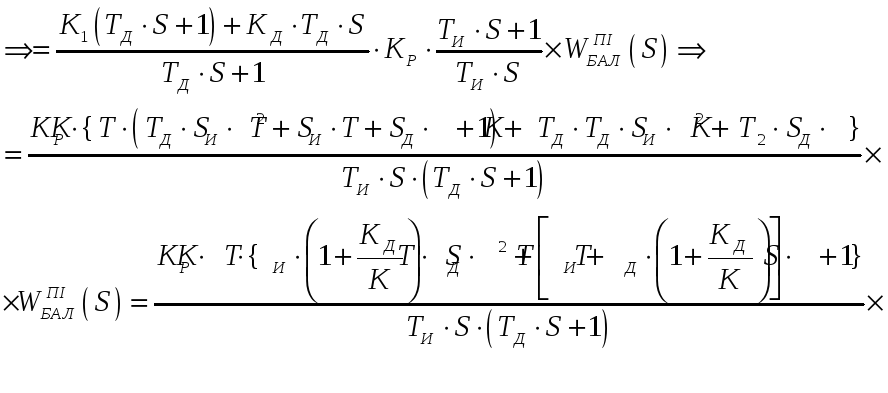

позначимо КР*, ТД* КИ*, т.ч. отримаємо рівняння ПІД-регулятора.
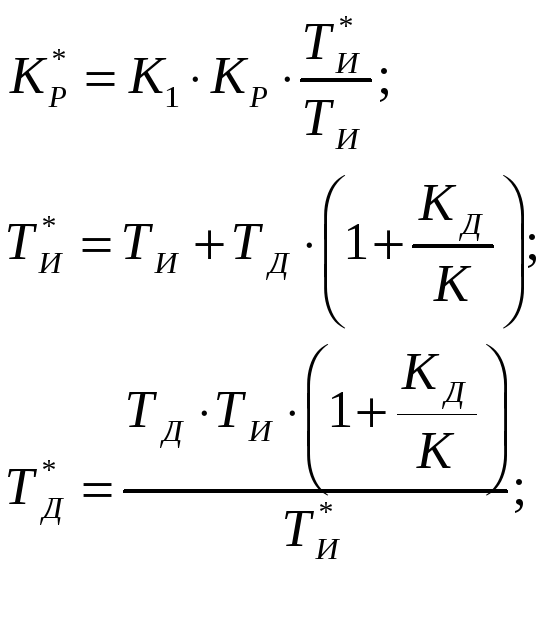
Висновок 1: і в цьому регуляторі параметри настройки взаємозв'язані.
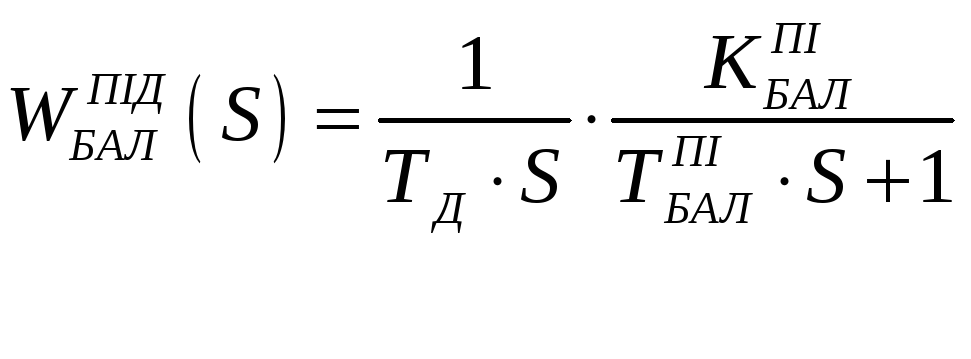
Висновок 2: передаточна функція баластної ланки має вигляд двох послідовних інерційних ланок, тобто вона є не коливальною аперіодичною, тому що корні характеристичного рівняння дійсні.
Висновок
3:відношення
 при найгірших умовах
при найгірших умовах
 .
.
Промислові ПІД-регулятори з аналоговими сигналами найчастіше будують за цією схемою.
§9.Промислові регулятори з нелінійними елементами.
В реальних умовах у складі автоматичного регулятора завжди є ланки з нелінійними характеристиками, такими типовими ланками є:
-
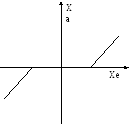
Нечутливість
Властива операційним підсилювачам, коли якійсь сигнал не підсилюється.
-
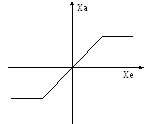
Обмеження – властиве вихідним сигналам підсилювача, в яких вихідний сигнал не може бути більше за напругу живлення. РО не можуть бути відкритими на 100%
0-100% – відкриття РО
-
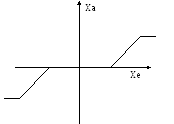
Нечутливість з обмеженням
-
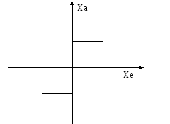
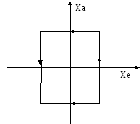
Ідеальне реле – властиве механічним реле з коефіцієнтом підсилення.
-
Люфт – властиве механічним редукторам в ВМ, в яких при реверсі шестерні деякий час переміщуються в повітрі до з’єднання з іншими шестернями.
-
Гістерезис – властиве елементам, що мають магнітні властивості (магнітні підсилювачі, соленоїди і ін.)
-
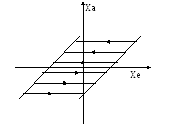
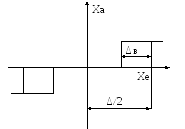
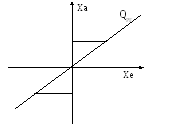
Трипозиційне реле – використовується в пускових пристроях у ВМ
Має 2 параметра: зона нечутливості ∆ та зона повернення ∆в
Загальним для цих та інших нелінійних характеристик є зміна коефіцієнта передачі в залежності від вхідного сигналу.
Коефіцієнт передачі може змінюватись від 0 до конкретного значення миттєво або скачко подібно, або з якоюсь швидкістю, залежно від амплітуди вхідного сигналу, тобто кожна з цих характеристик описується нелінійним алгебраїчним рівнянням.
Т.ч. наявність в структурі регулятора хоча б однієї нелінійної ланки робить його нелінійним.
Для таких регуляторів розглядають більш вузький діапазон роботи, що називають областю лінійної роботи.
Область лінійної роботи (ОЛР)– область у просторі амплітуди і частоти вхідного сигналу та параметрів настройки регулятора, в якій частотні характеристики нелінійного регулятора і його лінійної моделі (ідеальний регулятор) відрізняються не більше ніж на поперед задане значення.
Якщо обмежити амплітуду і частоту вхідного сигналу, то в деякий області параметрів настройки такий регулятор буде працювати як звичайний ідеальний регулятор.
Властивості граничної системи дають можливість побудувати регулятори з властивостями ідеальних регуляторів у випадках охоплення і не охоплення нелінійної ланки F(xл)
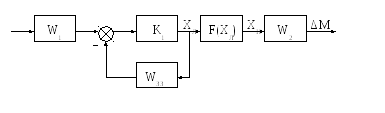
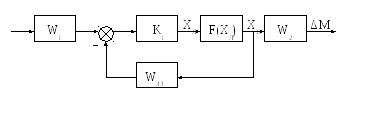
Ці всі інерційні ланки без інерційні, тобто миттєвої дії.
К1 – коефіцієнт передачі операційного підсилювача,
∆WЗЗ – передаточна функція ланки зворотного зв’язку,
F(ХЛ) – розширена частотна характеристика нелінійної ланки,
ХЛ, ХН – сигнал з виходу, відповідно, лінійної і нелінійної ланок,
W1 – передаточна функція нормуючого перетворювача (вона може бути і відсутня),
W2 – передаточна функція ВМ.
Для того, щоб дослідити властивості нелінійного регулятора в граничній системі використовується гранична лінеаризація, яку розробив Попов.
В її основу покладена вібраційна теорія, яка дозволяє визначити гармонійний коефіцієнт лінеаризації нелінійного елемента.
Для цього Попов розклав рівняння нелінійного елементу в спеціальний ряд, перший елемент якого називається гармонічний коефіцієнт передачі.
![]()
Т.ч. в ОЛР в разі виконання обмежень по амплітуді і частоті вхідного сигналу, поведінка нелінійного елемента близька до поведінки пропорційної ланки з відповідним коефіцієнтом передачі.
Для випадку а) можна записати еквівалентну передаточну функцію:
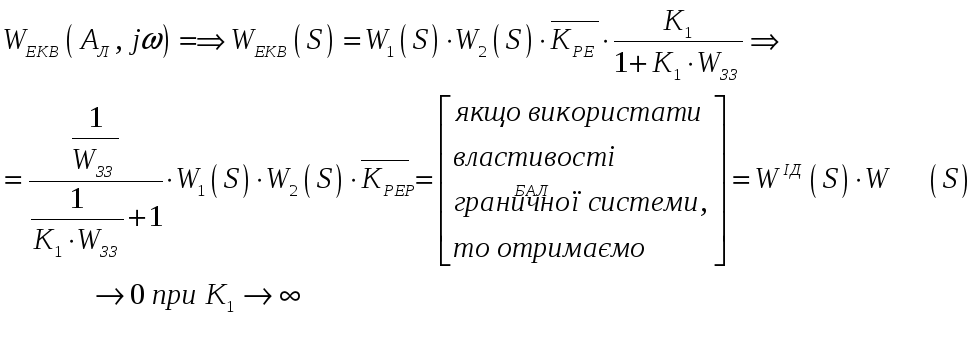

Висновок 1: в ОЛР в граничній системі властивості регулятора цілком визначаються передаточною функцією ланки зворотного зв’язку, тобто ми можемо формувати будь-який лінійний закон регулювання П, ПІ, ПІД, за рахунок підключення ланки зворотного зв’язку з потрібними властивостями.
Висновок 2: в реальному регуляторі, в якому К1 – якесь число, передаточна функція баластної ланки – інерційна ланка, тобто, якщо немає F(ХЛ), то настройки регулятора вибираються із ОНР, якщо немає ОЛР.
Висновок 3: ОЛР для регуляторів з нелінійністями значно менша, ніж ОНР, з цієї області визначаються настройки регулятора.
Для ПІД регулятора ОЛР буде мати наступні осі координат:
-
Амплітуда
-
Частота вхідного сигналу
-
Параметри нелінійного елементу (наприклад для трипозиційного реле – це зона нечутливості)
-
Зона повернення
-
Параметри настройки регулятора КР, ТИ, ТД
Або
-
А

-
Ω вхідні сигнали
-
∆

-
∆в нелінійні елементи
-
К
 Р
Р -
ТИ автоматичний регулятор
-
ТД
Зображувати такий простір можна за допомогою перетинів фіксованих координат усіма координатами.
Промислові автоматичні регулятори мають параметри настройки нелінійного елементу і автоматичного регулятора, які градуїровані виходячи з обмежень на амплітуду і частоту. Тобто їх шкали побудовані для ОНР.