§6. Реалізація лінійного пі-закону регулювання регулятором з вм постійної швидкості.
а) з охопленням зворотнім зв’язком ВМ сталої швидкості:
1 крок: визначимо тип ланки ЗЗ в ідеальному ПІ-регуляторі, для цього використаємо рівняння граничної системи:
Т.ч. знаходимо, що зворотна ланка – це типова диференціальна реальна ланка. У ЗЗ для формування ПІ-закону потрібно встановити реальну диференційну ланку (із-за S в чисельнику і знаменнику).
2 крок: визначимо властивості такого реального регулятора, для чого запишемо еквівалентну передаточну функцію:
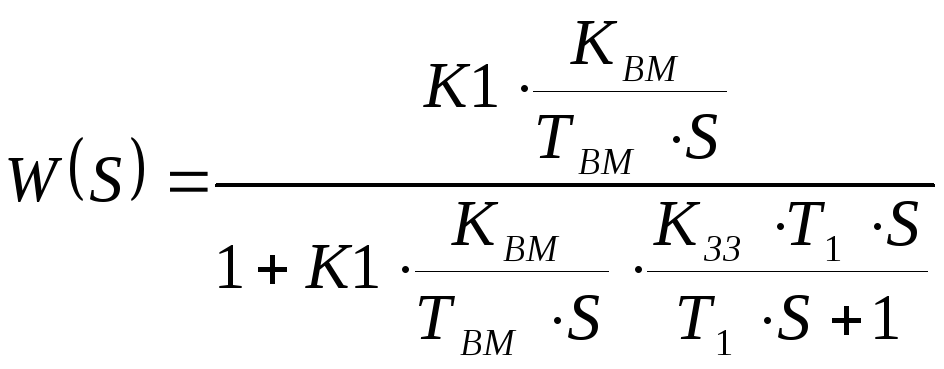
3 крок: відокремимо
в останньому виразі ідеальний ПІ-регулятор
і баластну ланку, помножимо чисельник
і знаменник на
![]() :
:

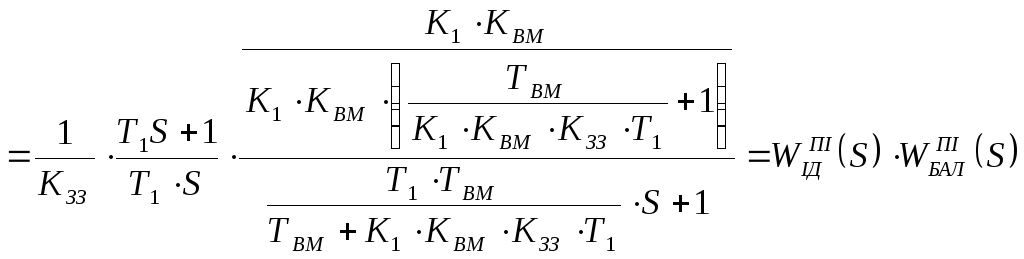 ,
,
Т. ч. реальний ПІ-регулятор можна представити, як послідовне з’єднання ідеального ПІ-регулятора і баластної ланки – аперіодичної ланки першого порядку, таким чином ідеальний закон може формуватися не точно.
4 крок: дослідимо властивості реального регулятора:
1)![]() .
Оскільки передаточна функція ідеального
ПІ-регулятора містить 2 параметри
настройки КР
і ТИ
, то параметр постійної інтегрування
(або час ізодрому) визначається постійною
часу реальною диференційної ланки Т1:
.
Оскільки передаточна функція ідеального
ПІ-регулятора містить 2 параметри
настройки КР
і ТИ
, то параметр постійної інтегрування
(або час ізодрому) визначається постійною
часу реальною диференційної ланки Т1:
![]() визначення параметрів
настройки КР
не залежить від ТИ.
визначення параметрів
настройки КР
не залежить від ТИ.
2) властивості баластної ланки:
 ,
,
Висновок: баластна ланка – це інерційна ланка першого порядку.
3) коефіцієнт передачі в граничній системі наближається до 1
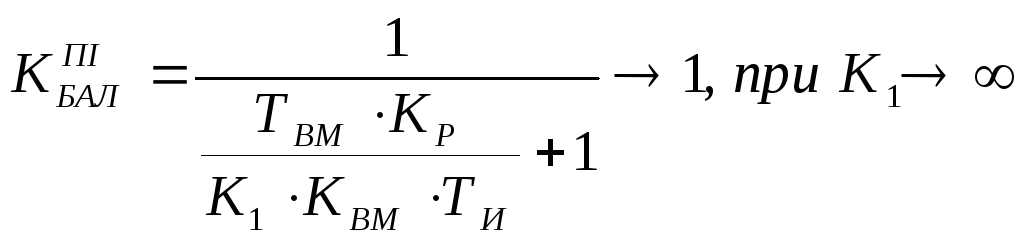 .
В реальному регулятори, де К1
– якесь число,
.
В реальному регулятори, де К1
– якесь число,
![]() - залежить від параметрів ВМ від якості
операційного підсилювача і від параметрів
автоматичного регулятора (АР):
- залежить від параметрів ВМ від якості
операційного підсилювача і від параметрів
автоматичного регулятора (АР):
![]()
4) постійна часу баластної ланки в граничній системі наближається до 0. приезжай
 ,
або інакше баластна ланка вироджується
в пропорційну ланку з одиничним
коефіцієнтом передачі.
,
або інакше баластна ланка вироджується
в пропорційну ланку з одиничним
коефіцієнтом передачі.
5) в реальному регуляторі
постійна часу залежить від всіх
параметрів, що входять в формулу
![]()
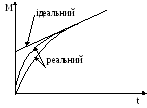
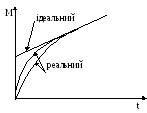
Крива розгону ідеального і реального регуляторів:
Поняття області нормальної роботи (ОНР).
Для реального автоматичного регулятора вводиться ОНР – це область у просторі стану АР (амплітуда і частота сигналу, що подається, і параметри настройки), в якій складові КЧХ реального регулятора відрізняються від КЧХ ідеального регулятора не більш на поперед задані величини.
∆
умови
∆Θ(ω)≤15град – фаза
Тому,

![]()
1) КЧХ ідеального П-регулятора:
 Т.
ч. на прикладі П-регулятора можна
побачити, як визначається ОНР. Передаточна
функція і КЧХ мають один і той же вираз.
Точка 0≤ω≤∞
– це точка для будь-яких частот.
Т.
ч. на прикладі П-регулятора можна
побачити, як визначається ОНР. Передаточна
функція і КЧХ мають один і той же вираз.
Точка 0≤ω≤∞
– це точка для будь-яких частот.
2) КЧХ баластної ланки реального П-регулятора – інерційна ланка:
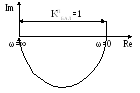 Для
інерційної ланки першого порядку КЧХ
має вигляд напив кола з діаметром=1. При
збільшені частоти сигналу, модуль КЧХ
зменшується до 0. Значить, якщо ми за
цими виразами побудуємо 3 графіки, то
модулі перемножаться при нульовій
частоті.
Для
інерційної ланки першого порядку КЧХ
має вигляд напив кола з діаметром=1. При
збільшені частоти сигналу, модуль КЧХ
зменшується до 0. Значить, якщо ми за
цими виразами побудуємо 3 графіки, то
модулі перемножаться при нульовій
частоті.
-
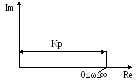
КЧХ реального П-регулятора:
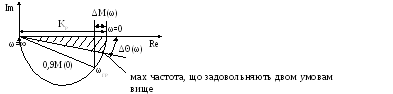
КЧХ реального регулятора має вигляд півкола з діаметром Кр, тобто промасштабовану КЧХ баластної ланки.
По цьому графіку можна визначити граничну частоту вхідного сигналу, що визначає ОНР регулятора.
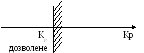
ОНР – це заштрихована область на графіку.
ОНР для П-регулятора
зображується, як :
ОНР для фіксованих граничних значень ω зображується у просторі настроєм.
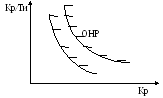
Для ПІ-регулятора ОНР має вигляд :
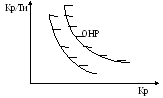 Ці
лінії мають різні значення Ти, тому
область трохи деформується.
Ці
лінії мають різні значення Ти, тому
область трохи деформується.
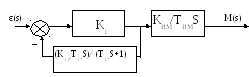
б) Реалізація ПІ закону регулювання без охоплення зворотнім зв’язком ВМ сталої швидкості:
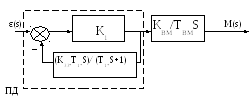
Визначимо передаточну функцію ланцюга ЗЗ.
Оскільки ВМ має властивості інтегральної ланки, а КПП включений послідовно з цим ВМ, то згідно з методом послідовної корекції, для одержання ПІ закону регулювання еквівалентною системою для формування П-складової , потрібно нейтралізувати інтеграл Д ланкою, а для формування інтегральної складової потрібно про масштабувати її П ланкою.
Т. ч. КПП повинен формувати ПД закон, виходячи з цього ми робимо 1 крок :
1 крок: визначимо передаточну функцію ланцюга ЗЗ.
В граничній системі закон регулювання визначається в ланці ЗЗ, т. ч. із рівняння граничній системи можна записати вираз :
![]() .
.
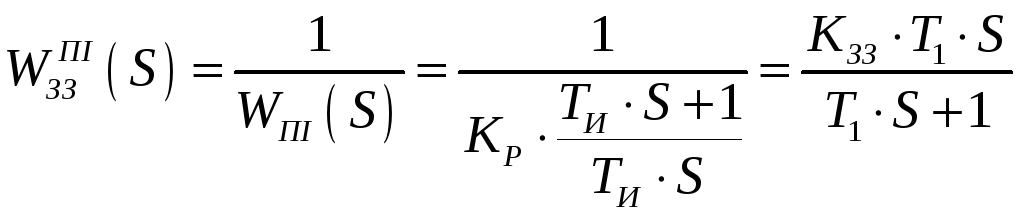
2 крок: визначимо еквівалентну передаточну функцію структури для реального регулятора:

![]() ,
,
![]()
Властивості ПІ-регулятора:
Передаточна функція ідеального ПІ-регулятора:
1)
![]() ,
постійна часу інтегрування визначається
постійною часу ЗЗ – Т1.
,
постійна часу інтегрування визначається
постійною часу ЗЗ – Т1.
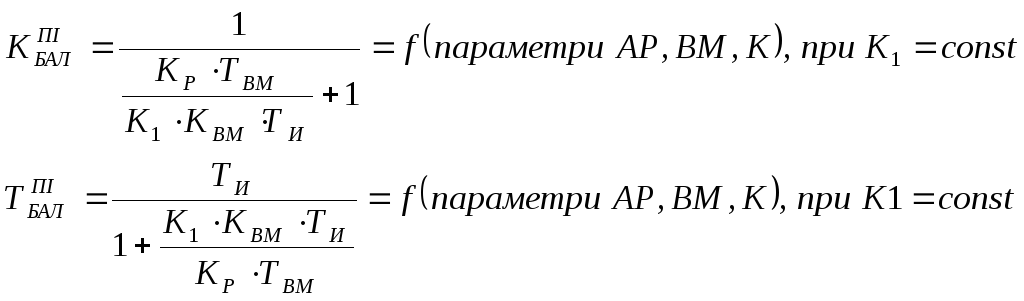
Висновок: постійна часу інтегрування ТИ (ізодрому) повністю визначається величиною постійної часу ланки ЗЗ Т1, як і в попередньому випадку, але КР записується, як:
![]() ,
коефіцієнт передачі регулятора залежить
від коефіцієнта передачі ланки ЗЗ КЗЗ,
параметрів ВМ (КВМ
і
ТВМ)
і параметрів настройки ТИ.
,
коефіцієнт передачі регулятора залежить
від коефіцієнта передачі ланки ЗЗ КЗЗ,
параметрів ВМ (КВМ
і
ТВМ)
і параметрів настройки ТИ.
![]() .
Параметри настройки КР
і ТИ
взаємозв’язані.
.
Параметри настройки КР
і ТИ
взаємозв’язані.
2) В граничній системі передаточна функція баластної ланки наближається до 1, тому що ТИ наближається до 0:
 ,
передаточна функція баластної ланки
→1, тому, що
,
передаточна функція баластної ланки
→1, тому, що
 ,
,
![]()
Для реального
регулятора вирази для
![]() :
:
Крива розгону і ОНР аналогічні попереднім: