

§2. Реалізація лінійних законів регулювання в автоматичних регуляторах з вм пропорційної дії.
а) метод послідовної корекції ВМ пропорційної дії (швидкості)
В цьому випадку послідовно включені КПП і ВМ, описуються передаточною функцією пропорційної ланки:
WВМ(s)= КВМ
Відповідно передаточна функція регулятора:
 WР(s)=
WКПП(s)*
WВМ(s),
WР(s)=
WКПП(s)*
WВМ(s),
якщо:

 , Wекв(s)=
W1(s)*
W2(s),
, Wекв(s)=
W1(s)*
W2(s),
якщо:

 , Wекв(s)=
W1(s)+
W2(s),
, Wекв(s)=
W1(s)+
W2(s),
якщо:
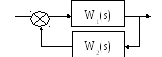
 , Wекв(s)=
Wпр(s)/1+
Wзамк(s)=
W1(s)/1+
W1(s)*
W2(s)
, Wекв(s)=
Wпр(s)/1+
Wзамк(s)=
W1(s)/1+
W1(s)*
W2(s)
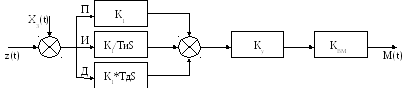
Для формування типового ПІД-закону використовуються 3 паралельно-включені ланки:
-
пропорційна, що має коефіцієнт передачі К1:
WП(s)=К1
-
інтегральна:
WИ(s)=К1/ТИS
-
диференційна:
WД(s)=К1*ТДS,
Wекв(s)= К1*(1+1/ТИS+ТДS),
Т.ч. ПІД-закон формується з 3-ох паралельно-включених ланок.
Коефіцієнт передачі регулятора КР – це добуток коефіцієнтів передач трьох послідовно-включених ланок.
Т.ч. параметр настройки КПП К1 буде дорівнювати :
К1=КР/КУ*КВМ
§3. Реалізація лінійних законів регулювання в автоматичних регуляторах з вм постійної швидкості (метод послідовної корекції).
б) ВМ сталої швидкості

Широко-розповсюджені ВМ постійної швидкості, мають властивості інтегральної ланки:
WВМ(s)=КВМ/ТВМS,
Тому, що вони відкривають або закривають РО з однією швидкістю. Ця швидкість визначається параметрами електроприводів і редукторів, так само і закриття.
 Ця
властивість дуже спотворює закон
регулювання, тому, як і раніше, послідовно
включені КПП і ВМ дають еквівалентну
передаточну функцію таку ж само, як і в
попередньому випадку, тому метод
називається метод
послідовної корекції.
Ця
властивість дуже спотворює закон
регулювання, тому, як і раніше, послідовно
включені КПП і ВМ дають еквівалентну
передаточну функцію таку ж само, як і в
попередньому випадку, тому метод
називається метод
послідовної корекції.
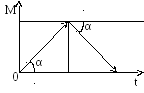
Для того, щоб одержати ПІД-закон регулювання потрібно врахувати інтегральні властивості ВМ.
Т.ч. для того, щоб сформувати П-складову , якщо ми вже маємо І-закон:
П=І*Д, потрібно сформувати похідну.
Для того, щоб сформувати І-складову:
І=І*П,
Для того, щоб сформувати Д-складову:
Д=І*Д*Д=І*Д2 .
При формуванні ПІД-складових закону регулювання, враховується наявність інтегральної ланки – ВМ постійної швидкості, тому пропорціональна складова формується диференціюванням інтегральної ланки; інтегральна складова – масштабуванням інтегральної ланки, диференційна складова – подвійним диференціюванням інтегральної ланки.
Тобто, П: WД(s)=К1*ТДS,
І: WІ(s)=К1,
Д: WД2(s)=К1*ТД2S2.
Так само, як і раніше коефіцієнт передачі регулятора в цілому враховує послідовне ввімкнення коефіцієнтів передачі всіх ланок.
КР=К1*КУ*(КВМ/ТВМ),
ВМ постійної швидкості найчастіше використовують в енергетиці та у вибухобезпечних виробництвах, а метод формування з розрахунком другої похідної використовується в цифрових регуляторах.
В аналогових регуляторах цей метод не використовується, оскільки формування другої похідної приладним або схемним шляхом підсилює завади, наприклад, якщо сигнал від датчика має короткочасну заваду.
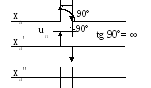 Т.ч.
один короткий імпульс – це два нескінченно
довгі імпульси першої похідної. Схемний
спосіб підсилює завади.
Т.ч.
один короткий імпульс – це два нескінченно
довгі імпульси першої похідної. Схемний
спосіб підсилює завади.
Висновок: метод послідовної корекції в аналогових регуляторах використовується з важкістю, потрібно ставити фільтри від завад.