

12. Математическая модель гидравлического демпфера.
Требуется построить структурную схему гидравлического
демпфера (амортизатора) с учетом массы подвижных частей. За
входную величину принята сила, а за выходную - перемещение
поршня (Рис.4.15).

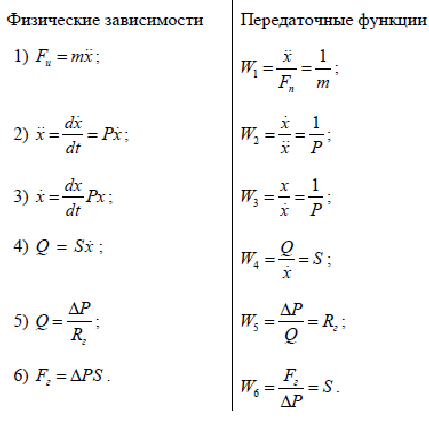
где F - внешняя сила; г F - гидростатическая сила; и F - инерционная
сила; x - перемещение поршня; P1,P2 - давления в полостях
цилиндра; Q - расход жидкости через дроссель; S - площадь поршня;
Rг - гидравлическое сопротивление дросселя.
Здесь разность внешней силы F и внутренней гидростатической
силы Fг определяет инерционную силу Fи . Эта разность сил зависит
от разности давлений жидкости ∆P = P1 – P2 в нижней и в верхней
полостях цилиндра.
В свою очередь, инерционная сила Fи определяет ускорение
поршня x. Проинтегрировав ускорение x, получим скорость x , а
проинтегрировав скорость x , получим перемещение x . Скорость x определяет расход жидкости Q из нижней полости в верхнюю
полость, что при известном гидравлическом сопротивлении
дроссельного отверстия в поршне позволяет найти разность давлений
жидкости ∆P в нижней и в верхней полостях гидроцилиндра, а
следовательно, и гидростатическую силу Fг .
Сеть связей физических величин показывает рассмотренные
качественные зависимости физических величин (рис. 4.16).
![]() Физические
уравнения и соответствующие им
передаточные
Физические
уравнения и соответствующие им
передаточные
функции определяют количественные зависимости физических величин.

Структурная схема амортизатора
Структурная схема (рис.4.17) представляет собой
имитационную модель гидравлического амортизатора. Движение
этой модели легко описать с помощью системы линейных ДУ и
решить их с помощью ЭВМ.
13. Математическая модель двигатель пост. Тока.

Рассмотрим отдельно электрическую и механическую части
электрического двигателя.
Входной величиной здесь является напряжение, а выходной -
частота вращения вала двигателя w. Под влиянием напряжения, через
обмотку якоря протекает ток i, который, взаимодействуя с магнитным
полем возбуждения Ф, создает на валу электродвигателя движущий
момент
![]() (4.1)
(4.1)
где с - коэффициент, зависящий от конструкции двигателя.
При
вращении якоря в магнитном поле в нем
возникает ЭДС
![]() (4.2)
Она направлена против питающего
напряженияU
и поэтому
(4.2)
Она направлена против питающего
напряженияU
и поэтому
вызывает уменьшение тока i. Коэффициент пропорциональности С в
формулах (4.1) и (4.2) зависит от конструкции двигателя и силы
магнитного поля Ф.
Рассмотрим схему замещения якорной цепи двигателя при
индуктивности якоря Lя =0 (рис.4.19). Внешнее напряжение U
уравновешивается суммой падения напряжения UR на омическом
сопротивлении R якоря U и ЭДС e.
Следовательно, можно записать:
 Зная
величину R U
, можно
определить ток i,
а ток i
определяет
Зная
величину R U
, можно
определить ток i,
а ток i
определяет
момент M на валу двигателя, последний, в свою очередь, связан с
частотой вращения уравнением движения:
![]() Определив
w - найдем ЭДС е.
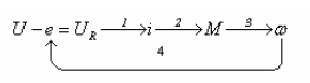
Рассмотренную причинно-
Определив
w - найдем ЭДС е.
Рассмотренную причинно-
следственную связь физических величин представим сетью связей
(рис.4.20).
В соответствии с сетью связей, запишем физические
зависимости и следующие из них передаточные функции

Сопоставив полученные выражения для передаточных функций
с сетью связей, легко построить структурную схему двигателя
(рис.21).
