

Непрерывно стохастические модели (q-схемы)
Особенностями непрерывно стохастических моделей рассмотрим на примере систем массового обслуживания, которые представляют собой класс математических схем, разработанных теорией управления массовыми процессами.
Основные состояния. В качестве процесса обслуживания могут быть представлены различные по своей физической природе процессы функционирования экономических, производственных, технических и других систем. При этом характерным для работы таких объектов является случайное появление заявок (требований) на обслуживание и завершение обслуживания в случайные моменты времени, т.е. имеет место стохастический процесс функционирования систем.
В любом элементарном процессе обслуживания можно выделить две особенных составляющих: ожидание обслуживания и само обслуживание.
Это можно изобразить в виде некоторого i-того прибора обслуживания.
![]() .
.
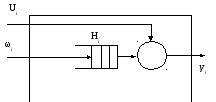
Прибор обслуживания
Рi
состоит из накопителя заявок Ni,
в котором может одновременно находиться
![]() заявок.
заявок.
Li – емкость i-того накопителя и канала обслуживания заявок Ki.
На каждый элемент прибора поступают потоки событий, в накопитель поток заявок ωi, на канал поток обслуживания Ui.
Потоком событий называется последовательность событий, происходящих одно за другим в случайные моменты времени.
Поток событий называется однородным, ели он характеризуется только моментами времени поступления данных событий, которые называются вызывающими моментами. Такой поток задается последовательностью tn.
![]() ,
,
где tn – момент наступления n-ного события, причем tn не отрицательное вещественное число.
Однородный поток может быть также задан в виде последовательности промежутков времени между n-ным и (n-1) событием. Такая последовательность обозначается τn, которая одназначна с последовательностью вызывающих моментов tn.
Поток неоднородных
событий называется последовательность
![]() ,
гдеtn
– вызывающие моменты, fn
– набор
признаков события.
,
гдеtn
– вызывающие моменты, fn
– набор
признаков события.
Применительно к элементарному каналу Ki, можно считать:
1. Поток заявок ωi принадлежит множеству заявок W, т.е. интервалы между моментами появления заявок образует подмножество неуправляемых переменных.
2. Поток обслуживания ui принадлежит множеству U, т.е. интервал времени между началом и окончанием обслуживания заявок образует подмножество управляющих переменных.
3. Заявки, обслуживание
каналом и заявок, покинувших прибор по
различным причинам образует выходной
поток
![]() ,
т.е. интервал времени между моментами
выхода заявок образуют подмножество
выходных переменных.
,
т.е. интервал времени между моментами
выхода заявок образуют подмножество
выходных переменных.
4. Процесс функционирования приборо обслуживания Pi можно представить, как процесс изменения его состояния во времени.
Время, за которое происходит изменение состояния объекта, обозначим через Zi.
Переход в новое состояние для прибора означает изменение количества заявок, которые в нем находятся в канале и накопителе. Таким образом, вектор состояния для прибора Pi будет иметь вид:
![]() ,
,
где
![]() - состояние накопителя (
- состояние накопителя (![]() - наполнитель пуст,
- наполнитель пуст,![]() - накопитель полностью заполнен),
- накопитель полностью заполнен),
![]() - состояние канала
(
- состояние канала
(![]() - канал пуст,
- канал пуст,![]() - заполнен).
- заполнен).
В практиках моделирования систем, имеющих более сложные структуры связи и алгоритм поведения, используют Q-схемы, образуемые композицией многих элементарных приборов обслуживания. Если каналы К различных приборов соединены параллельно, то имеет место многоканальное обслуживание (многоканальная Q-схема).
Если приборы соединены последовательно, то имеет место многофазное обслуживание, многофазная Q-схемы.
Таким образом, для создания Q-схемы необходимо оператор сопряжения R, отражающего взаимосвязь элементов структуры каналов и накопителей между собой.
Связи между элементами Q-схемы обозначаются стрелкой.
Различают разомкнутые и замкнутые Q-схемы.
Теории массового
обслуживания в зависимости от емкости
накопителя существует система с потерями,
когда
![]() ,
т.е. накопитель отсутствует, присутствует
только канал обслуживания.
,
т.е. накопитель отсутствует, присутствует
только канал обслуживания.
И системы с
ожиданием, когда
![]() ,
накопитель имеет бесконечную емкость
и очередь заявок не ограничивается.
,
накопитель имеет бесконечную емкость
и очередь заявок не ограничивается.
Также существует системы смешанные с ограниченной емкостью накопителя.
Математическая Q-схема описывается следующими векторами переменных:
![]() ,
,
где А – оператор алгоритма поведения заявок.
Оператор А зависит от набора правил, по которым заявки покидают накопитель и канал, для накопителя это правило переполнения, по которым заявки покидают систему, либо правила ухода, связанные с течением времени ожидания заявки. Для канала, это правило выбора маршрута или направления ухода.
№ 17