

методические указания по лабораторным работам / ИССЛЕДОВАНИЕ И НАСТРОЙКА СЕЛЬСИНОВ В СЛЕДЯЩИХ СИСТЕМАХ
.DOCМинистерство общего и профессионального образования
Российской Федерации
Саратовский государственный технический университет
ИССЛЕДОВАНИЕ И НАСТРОЙКА СЕЛЬСИНОВ В СЛЕДЯЩИХ СИСТЕМАХ
Методические указания к выполнению
лабораторной работы по курсу “Элементы и устройства систем управления”
для студентов специальности 2101
Одобрено
редакционно‑издательским советом
Саратовского государственного
технического университета
Саратов 1999
Ц е л ь р а б о т ы: ознакомление с принципом действия, конструкцией, режимами работы сельсинов в следящих системах автоматики.
ОСНОВНЫЕ ПОНЯТИЯ
В системах автоматического контроля и регулирования возникает необходимость передавать на расстояние заданный угол поворота вала контролируемого или регулируемого объекта или получать информацию о угловом положении вала этого объекта. В этих случаях, когда необходимо передать на расстояние положение какого-либо регулирующего органа: клапана, заслонки вентиля и т.д., сельсины, работающие в индикаторном режиме, являются наиболее удобными устройствами. Особенно в тех условиях, когда по условиям биологической опасности человек не может подойти к регулирующему органу, и показания передаются на пульт управления. Так, например, в современных ядерных реакторах положение регулирующих и компенсирующих стержней, характеризующих запас ядерного горючего в реакторе, передаётся также на пульт оператора с помощью сельсинов, работающих в индикаторном режиме.
На рис. 1 показана индикаторная система дистанционной передачи угла. При повороте вала на угол сельсин-датчиком /СД/ вырабатывается соответствующий этому углу сигнал, который передается по линии связи /ЛС/ на сельсин-приемник /СП/, где он преобразуется в угловое перемещение ротора СП на угол .
Если роторы сельсинов СД и СП занимают одинаковое положение относительно собственных обмоток возбуждения /ОВ/, то
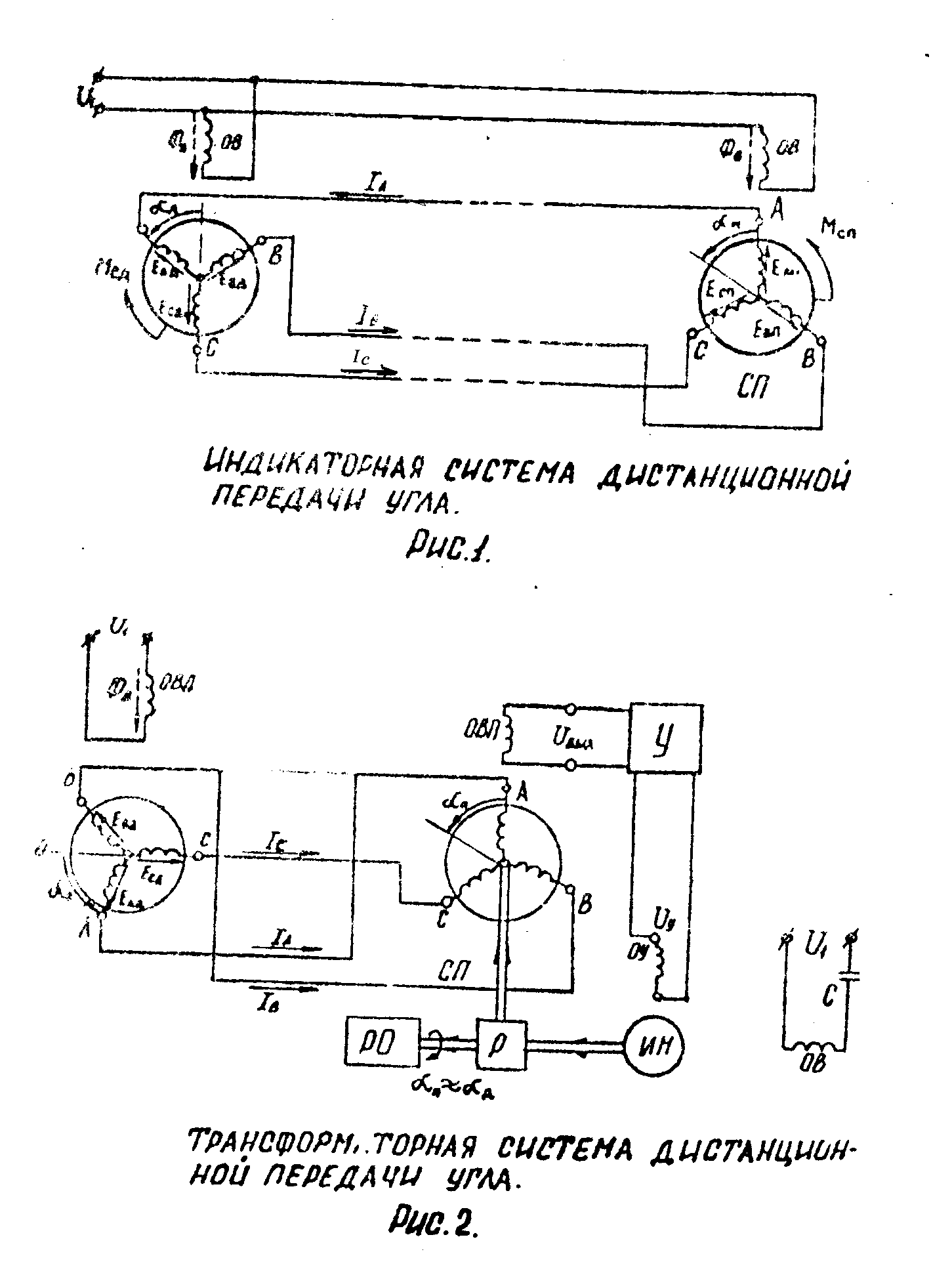
в обмотках фаз синхронизации этих сельсинов наводятся одинаковые ЭДС: Елд=ЕАП; ЕBD=EBП; ЕCD=EСП. В этом случае разность ЭДС в цепи одноименных фаз обмоток синхронизации равны нулю, ток в ЛС отсутствует/ IA=0; IB=0; Ic=0/ и система находиться в равновесии.
Если же ротор СД повернется на угол g , а ротор СП останется в прежнем положении /п=0/, то появиться угол рассогласования :
=g-п
и нарушиться равновесие ЭД.с в цепи синхронизации, т. е. ЕАDЕАП; EBD ЕBП; ЕCDEСП. .А т.к. одноименные фазы обмотки синхронизации Д и П включены встречено, то в цепях этих обмоток появиться результирующая ЭДС ΔЕ, под действием которых в обмотках синхронизации Д и П появятся уравнительные токи:
IA= ΔЕ/Z
IA= ΔЕ/Z
IA= ΔЕ/Z
Где Z – суммарное сопротивление коку синхронизации;
Z=ZD+ZП+ZЛ
Эти токи проходят по виткам фаз обмоток синхронизации, создают намагничивающие силы в Д и П. Поперечные составляющие ЭДС FDq и FПq
Взаимодействуют с магнитными потоками возбуждения и создают в П и Д вращающие синхронизирующие моменты МCD и МСП. Т. е. Индикаторная система дистанционной передачи угла является самосинхронизирующей.
На рис. 1 показана трансформаторная система дистанционной передачи угла поворота

на вал рабочего механизма, когда необходим значительный вращающий момент. Основные элементы трансформаторной системы:
сельсин-датчик /СД/, сельсин-приемник /СП/, усилитель мощности /У/, исполнительный двигатель /ИМ/ и редуктор/Р/, предназначенный для редукции частоты вращения и усиления вращающего момента.
В трансформаторной системе токи синхронизации создаются только электродвижущими силами, наведенными с датчиками , а не разностью ЭДС, как в индикаторной системе. Результирующая МДС синхронизации по продольной оси, созданная токами синхронизации, создает пульсирующий магнитный поток, который наводит в ОВП ЭДС:
Евых = Еmax sinD
Т. е. ОВП выполняет функцию генераторной обмотки. Этот сигнал напряжения Евых Uвых поступает на вход У, на выход которого включена обмотка управления ОУ ИДМ. При этом ротор двигателя приводит во вращение, которое через понижающий редуктор /Р/ передается на вал рабочего механизма /РО/ и на ротор СП. Т. е. СП самостоятельно не обрабатывает заданный угол поворота, а только выдает сигнал на включение ИД, который осуществляет отработку заданного угла поворота.
ТЕХНИКА ЭКСПЕРИМЕНТА
Лабораторная установка включает сельсин-датчик /СД/, сельсин-приемник /СП/, которые соединены линией связи. Питание стенда осуществляется путем подключения его через питающий кабель к сети переменного тока 220 В 50 Гц, что соответствует характеристикам СД и СП. За лицевой панелью стенда установлено электронное реле времени и смонтирован коммутатор. Для подачи питания выключатель В переводиться в режим «включено». Загорается сигнальная лампочка «напряжение продано». Через понижающий трансформатор Т напряжение питания 12 В, затем на выходе диодного выпрямителя имеем напряжение +12 В, которое через сглаживающий конденсатор С и переключатель SB1 подается на схему электронного реле времени, собранного по типовой схеме с усилителем тока на выходе, который на выходе подключен к магнитному реле.
Времязадающая цепочка собрана на элементах R1, C2, R2, с помощью переменного резистора R2 можно изменить время разряда конденсатора С, а следовательно, работы всего электронного устройства.
Эклектическая защита от КЗ во вторичной цепи осуществляется за счет плавких предохранителей F1.
ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСТНОСТИ
При выполнении лабораторной работы необходимо выполнять общие правила техники безопасности:
-
установку включать в сеть только после ознакомления с ее устройством и только по разрешению преподавателя;
-
перед включением установки в сеть предупредить всех присутствующих членов бригады;
-
при обнаружении неисправности (искрение, запах и т. п.) немедленно отключить установку от сети и сообщить преподавателю;
-
категорически запрещается производить устранение неисправностей, переключением клемм;
-
работать на установке разрешается в составе бригады из двух студентов.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Ознакомиться с лабораторной установкой, записать технические данные приборов, подготовить необходимые таблицы для записи результатов наблюдений.
2. Проверить: выключатель В1 в положении "выкл" - контрольная лампочка не горит.
3. Установить переключатель SB1 положение 1;
переключатель SB2 в положение 1; тумблер переменного резистора изменения времени и крайнее левое положение.
4. Индикаторный режим:
- включить стенд в питающую сеть;
- перевести переключатель Б1 в положение "включено",
- загорится контрольная лампа "напряжение подано";
- выполнить поворот СД на заданная угол,
- зафиксировать положение СП и записать в таблицу

- выключить стенд: выключатель В1 в положении "выключено".
5. Трансформаторный режим;
- перевести переключатель SB1 в положение 1; переключатель SB2 в положение 2;
- установить СД и СП в нулевое положение;
- включить стенд выключателем В1 , загорается контрольная лампочка ''напряжение подано";
- одновременно с включением выключателя В1 наблюдается синхронное вращение СД и СП, т. к. при этом происходит включение электромотора Д1 навалу которого закреплен СП;
- после заданного времени синхронного вращения СД И СП закончить режим отключением выключателя В1;
- зафиксировать положение СД и СП и записать в таблицу.
6. Синхронный режим
- установить стрелки СД и СП в нулевое положение;
- перевести переключатель SВ1, в положение 2, SB2 в
положение 3,
- установить время работы системы в синхронизирующем режиме - провести синхронизирующий режим, переключая переключатель В1;
-
зафиксировать положение СД и СП и записать в таблицу.
ОБРАБОТКА РЕЗУЛЬТАТОВ ЭКСПЕРИМЕТА
Вычислить параметры рассогласования систем СД-СП для индикаторного, трансформаторного, синхронизирующих режимов.
СОДЕРЖАНИЕ И ОФОРМЛЕНИЕ ОТЧЕТА
Отчет о работе оформляется в отдельной рабочей тетради и содержит:
1. Название лабораторной работы.
2. Цель работы.
3. Схемы режимов работы системы СД-СП.
4. Протоколы, таблицы измерений.
5. Выводы по работе и по использованию сельсинов в CAP и САУ.
6. Таблицы заполняются только ручкой; графики на миллиметровой бумаге о указанием масштабов и размерностей на осях, рисунки и схемы выполняются только чертежными инструментами с соблюдением ГОСТ.
Вопросы для самопроверки
1. Конструкция сельсинов.
2.. Особенности и области применения индикаторной системы дистанционной передачи угла.
3. Особенности и область применения трансформаторной системы дистанционной передачи угла.
4. Синхронизирующий режим сельсинов.
5 .Название демпферов в СП.
6, Динамический режим сельсинов.
Литература
Основная
1. Волков Н.И., Миловзоров В.П. Электромашинные устройства
автоматики. М.: Высшая школа, 1986. 2.Брускин Д.Э., Зорохович А.Е., Хвостов В. С.Электрические
машины и микромашины. -М.; Высшая школа, 1990.
Дополнительная
1. Справочник по средствам автоматики./ Под. ред.В.Э.Низэ и И.В. Антика. М.; Атомэнергоиздат, 1983 .
Время, отведенное на лабораторную работу ,
Подготовка к работе 1,5 акад.час
Выполнение работа 1 акад.час Выполнение расчетов и оформление отчета 1.5 акад.час
ИССЛЕДОВАНИЕ И НАСТРОЙКА СЕЛЬСИНОВ В СЛЕДЯЩИХ СИСТЕМАХ
Методические указания к выполнению
лабораторной работы по курсу “Элементы и устройства систем управления”
для студентов специальности 2101
Одобрено
редакционно‑издательским советом
Саратовского государственного
технического университета