

Потребный градиент набора высоты, публикуемый на схемах вылета (sid).
Градиент - мера возрастания (уменьшения) высоты на единицу пройденного расстояния G=H/S. Определяется как тангенс угла наклона траектории набора высоты и выражается в процентах.
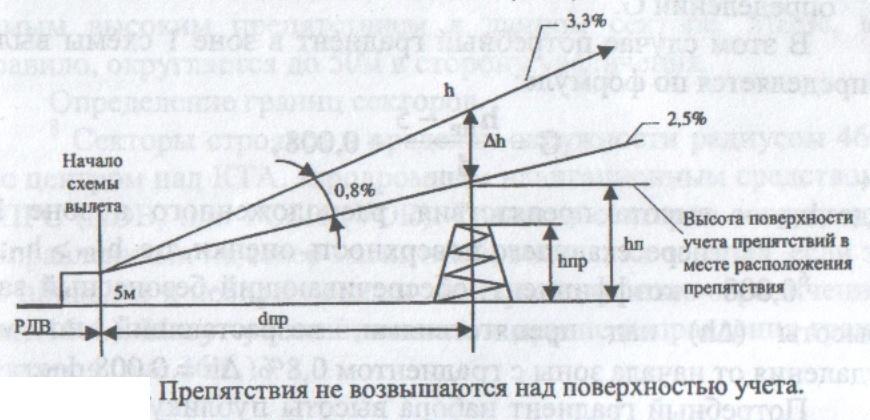
Поверхность оценки (учета) представляет собой плоскость с установленным наклоном в зоне учета препятствий,
Пересечение этой поверхности препятствием означает, что препятствие подлежит учету (оценке) при расчете безопасной траектории. Например, в зоне 1 поверхность оценки с наклоном 2,5% начинается на высоте 5м над началом схемы вылета и простирается над всей этой зоной.
Поэтому все препятствия зоны 1, которые пересекают поверхность оценки подлежат учету и называются существенными. Высота поверхности оценки препятствий на удалении dпр над уровнем окончания РДВ составляет:
13
hп=0,025∙dпр+5м.
В практике определения потребных градиентов схемы, обеспечивающих установленный безопасный запас высоты над препятствиями, возможны три вариант расчета:
1. Препятствия в зоне 1 таковы, что ни одно из них не возвышается над поверхностью оценки (учета). В этом случае градиент набора устанавливается равным 3,3% и не публикуется на схемах вылета (G=2,5+0,8=3,3%).
2. Поверхность оценки высоты препятствий пересекается одним препятствием, которое подлежит учету при определении G.
В этом случае потребный градиент в зоне 1 схемы вылета определяется по формуле:

14
где hпр - высота препятствия, расположенного в зоне 1 и пересекающего поверхность оценки, т.е. hпр > hп;
0,008 - коэффициент, обеспечивающий безопасный запас высоты (Δh) над препятствиями, возрастающий по мере удаления от начала зоны с градиентом 0,8%. Δh = 0,008∙dпр.
Потребный градиент набора высоты публикуется на схеме вылета всегда, когда он больше 3,3%. При этом публикуется высота, после которой набор высоты выполняется с нормальным градиентом (3,3 %).
3. Поверхность оценки пересекается несколькими препятствиями зоны 1, которые подлежат учету. В этом случае определяется потребный градиент для каждого из этих препятствий. Препятствие, для которого требуется максимальный градиент набора высоты - называется критическим, а этот градиент и высота, до которой он необходим, публикуются на схеме вылета в примечаниях.
15
1. Выполняем перевод полярных координат препятствий, измеренных относительно КТА, в прямоугольные координаты схемы захода на посадку и схемы вылета по точным формулам.
Положение препятствий указывается в прямоугольной систем координат с началом в точке пересечения осевой линии ВПП и порога ВПП.
Оси ОХ и ОУ располагаются в горизонтальной плоскости, проходящей на уровне порога ВПП, причем ось ОХ направлена по продолжению оси ВПП так, что положительные значения Х измеряются в направлении противоположном направлению захода посадку.
Положительные значения оси ОY измеряются вправо от направления захода на посадку. Знаки координат в таблице данных о препятствиях должны соответствовать фактическому расположению препятствий. При расчетах значение координат препятствий по оси OY всегда используется со знаком "+".
Началом полярной системы координат является КТА. Азимуты в полярной системе координат отсчитываются от истинного меридиана, проходящего через КТА. Высоты препятствий указываются абсолютные (относительно уровня моря).
При построении карты препятствий для схем вылета используется вспомогательная прямоугольная система координат с началом отсчета в точке пересечения осевой линии ВПП и концом РДВ.
Исходными данными для построения схем вылета являются:
• таблица препятствий относительно порога ВПП
• высота порога ВПП, Нпор
• длина ВПП, Lвпп (м)
16
• высота КПБ, Lкпб (м)
• высота конца РДВ, Нрдв.
Перевод полярных координат препятствий в прямоугольные для схемы захода на посадку (Хпр, Yпр) и схемы вылета (dпр,Yпр) можно выполнить тремя способами, два из которых приближенные и один точный.
Приближенные способы - графический и расчет с помощью НЛ-10М.
Точный способ - расчёт с помощью калькулятора (ПЭВМ) по точным формулам.
Азимут ВПП рассчитывается по формуле:
 ,
,

Система координат ХОY для схемы захода на посадку:



Для схемы вылета выполняется построение вспомогательной системы координат (dпр; Yпр):



17