

2.3.2. Виды зубчатых колес
При проектировании зубчатой передачи возникает вопрос о выборе коэффициентов смещения, которые определяют положение делительной прямой зубчатой инструментальной рейки (режущего инструмента) относительно делительной окружности нарезаемого колеса.
В реечном зацеплении делительная прямая рейки может располагаться различным образом по отношению к делительной окружности колеса. В зависимости от сдвига рейки зубчатые колеса бывают:
-
Нулевые.
-
Положительные.
-
Отрицательные.
Е
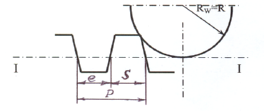
Толщина
зуба S
равна ширине впадины е
и равна половине шага:
S
= e,
S
=![]() p.
p.
-
Если смещение а направлено в сторону от оси нарезаемого колеса, то колесо называется положительным.
Толщина
зуба S
больше, чем ширина впадины е:
S
> e,
S
>
![]() p.
p.
-
Если смещение a рейки направлено в сторону оси нарезаемого колеса, это колесо называется отрицательным.
Толщина
зуба S
меньше, чем ширина впадины е
S
< e,
S
<
![]() p.
p.
2.3.3. Виды зацепления зубчатых передач в зависимости от смещения рейки
В зависимости от величин смещения каждого колеса можно получить три вида зацепления передач, отличающихся расположением начальных и делительных окружностей.
а). Нулевое зацепление. Данная передача составлена из нулевых колес. Начальные и делительные окружности совпадают, действительный угол зацепления равен стандартному (αw = α= 20o).
б). Равносмещенное зацепление. Эта передача составлена из положительного и отрицательного колеса с одинаковыми по абсолютной величине коэффициентами смещения. Начальные и делительные окружности совпадают и угол зацепления равен 20о. Отличие от нулевого зацепления заключается в том, что толщина зуба шестерни увеличивается, а у второго колеса - уменьшается, поэтому шаг остается таким же, как и при нулевой передаче (S1 = e2; S2 = e1, где е – ширина впадины).
в). Неравносмещенное зацепление. Эта передача может быть составлена из положительного и нулевого колеса или из двух положительных колес. Делительные окружности не совпадают с начальными и действительный угол зацепления больше стандартного (αw > 20о). Сумма толщин зубьев не равна шагу (S1 + S2 > P). Поэтому, чтобы вписать данную передачу в заданный шаг, применяют коэффициент уравнительного смещения Δу.
2.3.4. Определение размеров зубчатой передачи
Размеры колес, а так же всего зацепления, зависят от чисел зубьев колес Z1 и Z2, от модуля m зацепления, общего для обоих колес, а также от метода их обработки.
Формулы для определения размеров элементов цилиндрического зацепления с прямым зубом представлены в табл. 1 приложения.
На основании известных Z1, Z2, и U12 определим коэффициенты смещения Х1, Х2, для равносмещенного зацепления по таблице приложения 6, а для неравносмещенного зацепления коэффициенты Х1, Х2 и Δу в зависимости от передаточного отношения:
а) если 2≥ U12 ≥1, то Х1, Х2 определяются по таблице приложения 4, Δу - по таблице 2.
б) если 2≤U11≤5, то Х1 и Δу по таблице 3, Х2 - по таблице 5.
2.3.5. Геометрические элементы зубчатых колес
Радиусы начальных окружностей RW – радиусы окружностей колес, соприкасаемых в точке полюса р, перекатываемых без скольжения. Поэтому, межосевое расстояние аW можно вычислить по формуле
аW=[O1O2] = RW1+ RW2. (11)
Радиус делительной окружности R – радиус, который делит высоту зуба на ножку и головку (рис. 3).
Для нулевой (стандартной) передачи радиус делительной окружности равен радиусу начальной, т.е.
R = RW.
Модуль зубчатого зацепления m – отношение шага Р к числу π:
![]() .
(12)
.
(12)
Модуль – это стандартная величина, выбираемая их ряда рациональных чисел согласно ГОСТ 9563-60; измеряется в мм.
В первом, предпочтительном ряду предусмотрены следующие модули в мм: 0,05; 0,06; 0,08; 0,1; 0,12; 0,15; 0,2; 0,25; 0,3; 0,4; 0,5; 0,6; 0,8; 1,0; 1,25; 1,5; 1,5; 2; 2,5; 3; 4; 5; 6; 8; 10; 12; 16; 20; 25; 32; 40; 50; 60; 80; 100. Во втором ряду предусмотрены модули, промежуточные между модулями первого ряда, например: 3,5; 4,5; 5,5; 7; 9; 11 и др.
Шаг зубчатого зацепления Р – расстояние по делительной окружности между одноименными точками двух соседних зубьев.
Высота зуба h – расстояние между окружностями впадин Rf и выступов Ra. Высота зуба складывается из высоты ножки зуба hf и высоты головки зуба hа
h= hf + hа. (13)
Для нулевого (стандартного) колеса ha =m, hf = 1,25m, тогда
h=2,25m.
Радиус основной окружности Rb – радиус, с которого начинается построение эвольвенты.
Эвольвента – развертка круга, боковая поверхность зуба.
Радиус окружности впадин Rf – радиус, ограничивающий ножку (впадину) зуба.
Радиус окружности выступов Rа – радиус, ограничивающий головку (вершину) зуба.