

лекции / Идентификация объектов управления - УП - Семёнов-Артамонов-Брюхачев - 2003 - 215
.pdfw0=tf([-1 1],[1 1]); ws=a(1);nun=a(1); pp=[1 1];pm=[-1 1]; den=1;d=1;
% Вычисление передаточной функции объекта по (4.18)
for j=2:(n+1)/2 den=conv(den,pp); d=conv(d,pm); nun=conv(nun,pp)+a(j)*d; ww=tf(nun,den)
end
ww=minreal(ww)% Получение минимальной реализации передаточной функции
step(ww,wo) pause
bode (ww,wo) pause
[wb,g]=balreal(ww); )% Получение сбалансированной реализации передаточной функции
wm=modred(wb,[4:(n-1)/2]); step(wm,ww,wo) ww=zpk(tf(wm))
На рис. 4.6 показана вещественная частотная характеристика объекта для относительных значений частоты ϕ = 2arctg(ω)
Рис. 4.6.
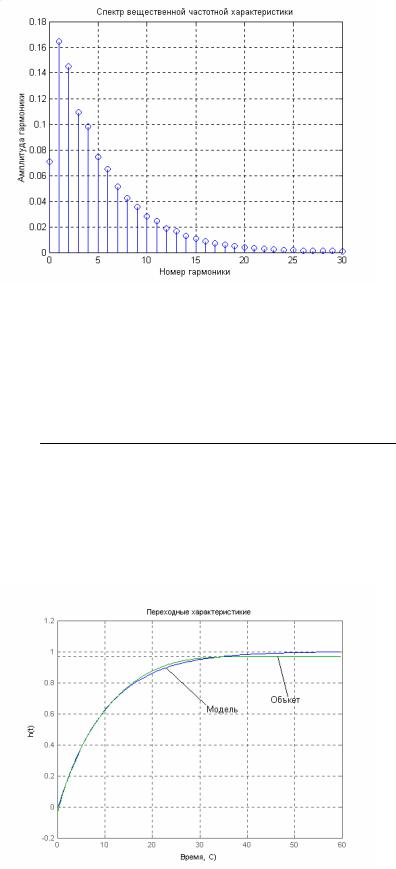
На рис. 4.7 приведены результаты гармонического анализа вещественной частотной характеристики (рис. 4.6), позволившие найти амплитуды гармоник Ак.
Рис. 4.7.
Расчет передаточной функции по формуле (4.18) с удержанием трех составляющих сбалансированной реализации модели (4.18) дает следующее выражение передаточной функции
W(p) = - 0.038723 (s - 2.923) (s^2 + 0.2386s + 0.04178) (s + 0.1553) (s^2 + 0.2452s + 0.03147)
Переходные характеристики исходного объекта и его модели, полученной в результате идентификации, изображены на рис. 4.8. Следует отметить значительные погрешности идентификации рассмотренного метода, особенно при определении коэффициента передачи объекта.
Рис.4.8.

4.3.Корреляционный метод идентификации
Вдействительности выходные переменные объекта y(t) определяются не только детерминированными управляющими входными сигналами u(t), но и ненаблюдаемыми и неуправляемыми воздействиями (помехами) e(t), что вызывает отклонения выходных переменных от заданных значений.
Чтобы получить уравнение связи между статистическими характеристиками входа и выхода для стационарных эргодических процессов, пользуются их статистическими характеристиками и, в частности, корреляционными функциями или спектральными плотностями/
Структурная схема исследуемого объекта в этом случае может быть представлена в виде, изображенном на рис. 4.9.
e(t)
u(t) + y(t)
W(p)
Рис. 4.9.
Все ненаблюдаемые помехи, воздействующие на различные части объекта, приведены к выходу объекта и представлены в виде аддитивного шума. Значение выходного сигнала вычисляется по формуле
∞ |
|
y(t)= ∫ω(τ)u(t − τ)dτ + e(t), |
(4.23) |
−∞
Умножив это выражение на x(t + τ) и проинтегрировав обе части по τ в
пределах от –T до T (при T → ∞), получим:
Ry,u (τ)= ∞∫ω(t)Ruu (t − τ)dt + Rue (τ). |
(4.24) |
−∞ |
|
Если Rue(τ) = 0 и ω(t) = 0 , при t < 0 (условие физической реализуемости системы), то уравнение принимает вид:
Ry,u (τ)= ∞∫ω(t)Ruu (t − τ)dt , |
(4.25) |
0 |
|
называемое уравнением Винера-Хопфа.
Это уравнение относится к линейному интегральному уравнению первого рода. Его численное решение осуществляется методом аппроксимирующих функций, вычисление которых, в свою очередь, производится на основе метода коллокации, метода наименьших квадратов и метода Галеркина. Решение Уравнения Винера-Хопфа и дает выражение для функции веса объекта.
Рассмотрим решение этого уравнения, используя его дискретный аналог
n |
|
Ry,u (m)= ∑ω(k)Ru,u (m − k) |
τ , |
k =0 |
|
где τ -интервал дискретизации корреляционных функций.
Обозначим
|
|
|
R |
uu |
(0) |
R |
uu |
(1) |
K R |
uu |
(n −1) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Ruu (0) |
Ruu (0) |
K |
|
|
Ruu (0) |
|
; |
||||||||
|
Ru,u = |
|
M |
|
|
|
M |
|
K |
|
|
|
|
M |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Ruu (n − 2) |
K |
|
|
Ruu (0) |
|
|
||||||
|
|
Ruu (n −1) |
|
|
|
|
||||||||||||
|
|
|
|
|
|
ω(1) |
|
|
|
r(1) |
|
|
|
|
|
|||
|
|
|
|
|
|
ω(2) |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
; R y,u |
r(2) |
|
, |
|
|
|
|||||
|
|
|
|
w = |
M |
|
= |
M |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
ω(n) |
|
|
r(n) |
|
|
|
|
||||||
где r(i) = |
Ry,u (i) |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда (4.26) можно записать в матричном виде
R y,u = Ru,u w .
Откуда искомые значения функции веса будут равны
w = Ru,−1u R y,u
(4.26)
(4.27)
(4.28)
(4.29)
(4.30)
В силу плохой обусловленности матрицы Ru,u решение уравнения (4.30)
будет неустойчивым. Неустойчивое решение приводит к большим изменениям
решения при малых изменениях коэффициентов матриц R y,u и Ru,u . |
|
||||||
Более |
точное |
решение |
может |
быть |
получено |
методом |
|
аппроксимирующих функций с использованием метода коллокации [35]. |
|||||||
В соответствии с этим методом аппроксимируют функцию веса линейной |
|||||||
комбинацией из m ортогональных функций |
|
|
|
||||
|
|
~ |
|
m |
|
|
(4.31) |
|
|
ω(t) = ∑αkϕk (t) , |
|
||||
|
|
|
|
k =1 |
|
|
|
Вычисляют m функций вида |
|
|
|
|
|
||
|
|
fk (t) = ∫t |
ϕk (τ)Ruu (t −τ)dτ . |
|
(4.32) |
||
|
|
0 |
|
|
|
|
|
Метод коллокации дает систему из m линейных уравнений для нахождения неизвестных коэффициентов аппроксимирующей функции αk
m |
|
∑αk fk (k) = Ruy (i) i =1,2,...m |
(4.33) |
k=1
Втом случае если желательно получить передаточную функцию объекта
ввиде дробно-рациональной функции, можно по вычисленной функции веса (4.31) найти передаточную функцию используя логарифмический метод (см.
п.4.1).
Так как в эксперименте получаются оценки корреляционной функции, значение искомой функции веса оказывается приближенным. Структура уравнения Винера-Хопфа такова, что небольшие ошибки в определении корреляционных функций приводят к существенным ошибкам в определении импульсной переходной характеристики ω(t) и в итоге к невысокой точности
идентификации параметров системы. Более перспективным является использование корреляционного метода для определения запаздывания в объекте управления. Величина запаздывания будет равна значению аргумента взаимной корреляционной функции, при котором она достигает максимума.
Для повышения точности оценок корреляционных функций необходимо правильно выбирать интервал наблюдения сигналов, для которых оцениваются эти корреляционные функции. Пусть в результате пассивного эксперимента получены оценки корреляционной функции входного сигнала объекта Ruu (τ) и
взаимной корреляционной функции между его входом и выходом Ruy (τ). В
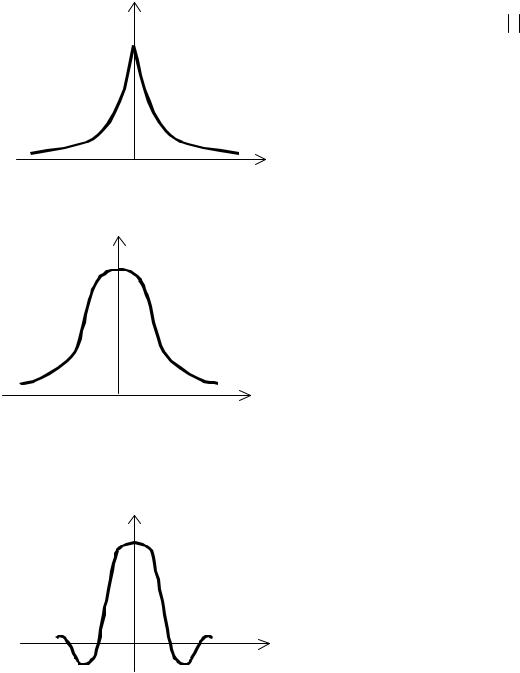
зависимости от вида графика корреляционной функции Ruu (τ) (рис. 4.10), ее аппроксимируют одним из следующих выражений.
Ruu (τ ) Ruu (τ) = R(0)e−a τ
τ
а)
Ruu (τ )
Ruu (τ) = R(0)e−aτ 2
τ
б)
Ruu (τ )
τ |
Ruu (τ) = R(0)e−a |
|
τ |
|
Cos(ωτ) |
|
|
||||
|
|
в)
Рис. 4.10. |
|
|
|
|
|
|
|
|
|||
|
|
В первом случае (рис. 4.10, а) интервал наблюдения выбирается из |
|||||||||
условия |
|
|
|
|
|
|
|
|
|||
|
40 |
|
20 |
|
|
α |
|
1 |
|
||
T ≥ |
|
|
, во втором (рис.4.10, б) - T ≥ |
|
и в третьем T ≥ 20 |
|
|
+ |
|
|
. |
α |
|
α |
α 2 |
+ω 2 |
α |
||||||
|
|
|
|
|
|
||||||
Пример 4.3. Проведем идентификацию корреляционным методом объекта
с передаточной функцией |
|
|
W ( p) = |
2,5 |
. |
( p + 0,1)( p2 + 6 p + 25) |
Идентификация проводилась программой приведенной ниже.
k=2.5;p1=-.1;p2=-3+4*i;p3=-3-4*i; p=[p1 p2 p3];
wo=zpk([],p,k);
[nun,den]=tfdata(wo,'v');
wo=tf(nun,den,'td',10);% Введение запаздывания в объект
tm=700;dt=.01;
t=0:dt:tm;
n=length(t);
u=randn(n,1);% Формирование входного сигнала y=lsim(wo,u,t); % Формирование выходного сигнала
tau=-tm:dt:tm;
ruu=xcorr(u,u,'biased');% Вычисление корреляционной функции входного сигнала ryu=xcorr(y,u,'biased');% Вычисление взаимной корреляционной функции
w=impulse(wo,t);
m=1:5000;
plot(t(m),w(m),t(m),ryu(n:n+4999)/dt),grid
Как следует из (4.25), взаимная корреляционная функция Ruy будет равна функции веса объекта, если корреляционная функция входного сигнала будет являться δ - функцией. Такую корреляционную функцию имеет сигнал типа «белый шум». Если теперь подать на вход объекта «белый шум» (рис. 4.11), имеющий корреляционную функцию в виде δ - импульса (рис. 4.12), то взаимная корреляционная функция будет равна функции веса (рис. 4.13).
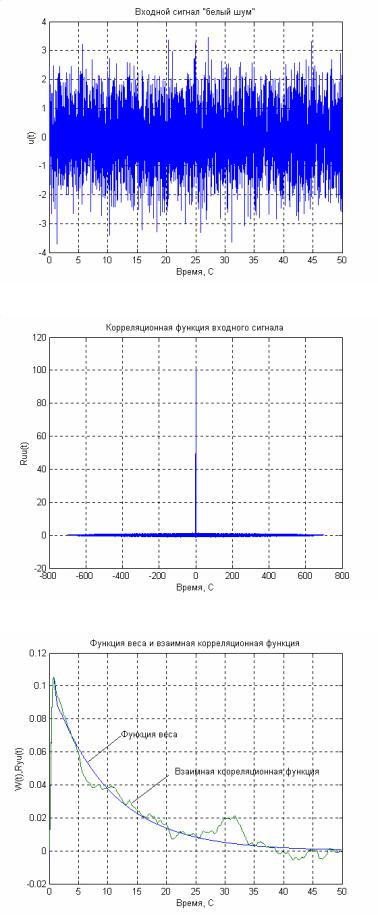
Рис. 4.11.
Рис. 4.12.
Рис. 4.13.
Расхождение кривых на рис. 4.13 обксловлено невозможностью сформировать на входе объекта идеальный “белый шум” и погрешностями вычисления корреляционных функций.
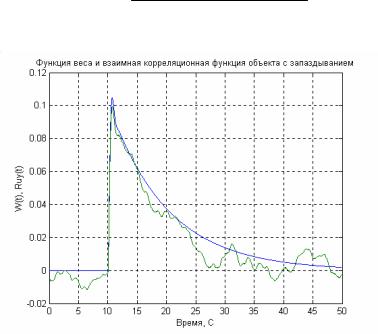
Для того чтобы убедится в эффективности вычисления запаздывания корреляционным методом, вчислим функцию веса и взаимную корреляционную функцию объекта с запздыванием раным 10 С.
W ( p) = 2,5e−10 p
( p + 0,1)( p2 + 6 p + 25)
Рис. 4.14.
Как следует из рис. 4.14 величина запаздывания легко вычисляется и равна 10 С.
4.4. Идентификация параметров объекта спектральным методом
Спектральные методы идентификации [74]основаны на использовании аппарата матричных операторов, основы которого рассматривались в п. 2.5. Эти методы являются дальнейшим развитием частотных методов и основываются на разложении сигналов объекта по ортонормированным функциям, не обязательно гармоническим. Результатом идентификации является определение ядра интегрально уравнения объекта (2.79), которое в простейшем случае линейных одномерных систем совпадает с функцией веса. Поэтому эти методы также можно отнести к непараметрическим методам идентификации. Спектральные методы могут применяться для идентификации нестационарных систем, параметры которых, и в частности ядро интегрального уравнения, изменяются во времени.
Пусть стационарный объект описывается интегральным соотношением
y(t) = ∫t ω(t −τ)x(τ)dτ . (4.34)
0
где ω (t) – функция веса объекта.
В результате проведения эксперимента в интервале времени [0,Т] зарегистрированы детерминированные сигналы x(t) и y(t). В соответствии с методом матричных операторов представим их в виде разложения по
ортонормируемому базису некоторых ортогональных функций |
|
x(t) = ΦT (t)Cx , y(t) = ΦT (t)C y , ω(τ) = ΦT (τ)a . |
(4.35) |
Подставим (4.35) (4.34), тогда |
|
t |
|
ΦT (t)Сy = ∫ΦT (t −τ)aΦT (τ)Сx dτ . |
(4.36) |
0 |
|
Вынося из под знака интеграла переменные не зависящие от τ и умножая последовательно (4.36) на Ф(t), а затем интегрируя обе части по t, в силу ортогональности выбранного базиса получим систему уравнений для вычисления неизвестной матрицы системы а
T |
t |
|
ciy = aCx ∫ϕi (t) ∫Φ(t −τ)Φ(τ)dτ dt . |
||
0 |
0 |
|
Обозначая результат |
интегрирования |
ортонормированной |
функций в соответствии с (4.37) как |
|
|
T |
t |
|
S = ∫ϕi (t) |
∫Φ(t −τ)Φ(τ)dτ dt , |
|
0 |
0 |
|
(4.37)
системы
(4.38)
значение которой характеризуют свойства выбранного базиса, можно найти А из системы алгебраических уравнений
n |
n |
|
cky = ∑ ∑a j cix sijk , k=1,2,…n, |
(4.39) |
|
j=1 |
i=1 |
|
или в матричном виде |
|
|
Sc a = cy |
(4.40) |
|