

а0[y1(k+2)1(k)+ y2(k+2)2(k)] + 1(k)[a0 y1(k+2)+ a1 y1(k+1)+
+ a2 y1(k)]+ 2(k)[a0 y2(k+2)+ a1 y2(k+1)+ a2 y2(k)] = F(k).
Поскольку y1(k)иy2(k)суть решения соответствующего однородного уравнения, то из последней формулы имеем
y1(k+2)1(k)+ y2(k+2)2(k) = F(k)/a0. (2.32)
Теперь осталось решить систему уравнений (2.32) и (2.31) относительно неизвестных 1(k)и2(k)
![]()
![]()
и определить сами функции 1(k) и 2(k):
![]()
![]() (2.33)
(2.33)
Знаменатели в (2.33) отличны от нуля, так как y1(k) и y2(k)– независимые решения однородного уравнения, а следовательно, выполняется условие (2.20).
Обобщим результаты решений уравнений первого и второго порядка на уравнение произвольного порядка (2.17).
Общее решение однородного уравнения берем в виде (2.21). Тогда частное решение ищется в форме
yH (k) = 1(k)y1(k) +…+ n(k)yn(k) . (2.34)
Одно из условий, накладываемых на функции i(k), -это удовлетворение исходного уравнения (2.17), а остальныеn-1условий определяются уравнениями, аналогичными уравнению(2.31):
y1 (k+1) 1(k) + y2(k+1) 2(k) +…+ yn(k+1) n(k) = 0;
y1 (k+2) 1(k) + y2(k+2) 2(k) +…+ yn(k+2) n(k) = 0;
.
.
.
y1 (k+n-1) 1(k) + …+ yn(k+n-1) n(k) = 0. (2.35)
Подставляя решение (2.34) в уравнение (2.17) и учитывая (2.35), после соответствующих преобразований будем иметь
y1 (k+n) 1(k) + y2(k+n) 2(k) +…+ yn(k+n) n(k) = F(k)/a0. (2.36)
Решая систему из n уравнений (2.35) и (2.36), находим
![]()
или
![]() (2.37)
(2.37)
где С(k) – определитель Касорати, а Сni(k) – алгебраические дополнения ni – ых элементов. Из условия (2.20) следует, что С(k) отличен от нуля, если y1(k) yn(k) - линейно независимые решения однородного уравнения.
Выражение (2.37) дает в явном виде решение yН(k) по известному y0(k) для произвольной вынуждающей функции F(k), хотя в некоторых случаях трудно представить в замкнутом виде входящую в формулу (2.37) сумму. Метод вариации параметров позволяет находить решение и разностных уравнений с переменными коэффициентами, то есть уравнений, описывающих нестационарные во времени системы. Завершая этот подраздел, введем понятие передаточной функции дискретной во времени системы.
Решим формально уравнение (2.15) или (2.16) относительно выхода y(k):
 (2.38)
(2.38)
Идентифицируем оператор Ес некоторой независимой переменнойz. Тогда характеристикой системы, описываемой уравнением (2.15), будет отношение полиномовB(z) к A(z):
![]() (2.39)
(2.39)
Последнее соотношение и определяет формально передаточную функцию дискретной системы (другие названия – «импульсная передаточная функция», «дискретная передаточная функция»). Более строго импульсная передаточная функция будет определена чуть дальше с использованием z - преобразования.
2.3 Дискретное преобразование Лапласа
Для исследования непрерывных систем широко применяется преобразование Лапласа. Но непосредственное применение преобразования Лапласа к разностному уравнению и, в частности, к любой решетчатой функции f(kT) тождественно дает нуль, так как площадь этой функции ( или в физической интерпретации – энергия такого сигнала) равна нулю. Чтобы выйти из этого затруднительного положения, придадим функции f(kT) площадь, равную значению этой функции. Проще всего это сделать, умножив значение функции в точке t = kT на дельта – функцию, принимающую бесконечное значение в этой же точке. Проделав такую операцию для всех k, при которых определена функция f, получим импульсную функцию
![]() (2.40)
(2.40)
представляющую собой последовательность «идеальных» импульсов с бесконечной амплитудой и бесконечно малой длительностью, причем каждый импульс имеет площадь, равную значению функции f(kT). Точно такую же импульсную функцию можно получить и из непрерывной функции f(t), применив к ней формулу (2.40)
![]() (2.41)
(2.41)
где через δТ(t) обозначена соответствующая сумма δ – функций.
Воспользовавшись выражением (2.41) можно дать одно из понятий дискретного преобразования Лапласа, наиболее удобное с инженерных позиций. Определим дискретное преобразование Лапласа функции f(t) как преобразование Лапласа от импульсной функции f*(t), соответствующей непрерывной функции f(t):
![]() (2.42)
(2.42)
Преимущество такого определения состоит в том, что эта новая операция полностью выражается через уже знакомую и хорошо изученную операцию обычного преобразования Лапласа.
Согласно (2.42) и с учетом (2.41) имеем
![]()
Поменяв в правой части последнего выражения порядок интегрирования и суммирования, получим
![]() (2.43)
(2.43)
В формуле (2.43) отсутствует δ– функция, и она может быть использована непосредственно для решетчатой функции.
Нетрудно получить альтернативную формулу для вычисления дискретного преобразования Лапласа функции f(t) по ее обычному преобразованию Лапласа.
Опять воспользуемся выражениями (2.41) и (2.42).
Имеем
![]()
Для вычисления правой части последнего выражения используем теорему свертки в области изображений (см. формулу (1.54)); учитывая, что
![]()
Ряд в правой части последнего выражения сходится при |e-sT| < 1, т.е. при Re s>0 и его сумма равна 1/1-e-Ts (сумма геометрической прогрессии).
Таким образом, получим
![]() (2.44)
(2.44)
При записи выражения (2.44) использована формула (1.54), причем в качестве функций F1(s), F2(s) взяты соответственно 1/1-e-Ts и F(s), а величина с удовлетворяет соотношениям (1.54') и (1.54''), следовательно, все полюсы функции F(s) лежат левее линии интегрирования. Абсцисса абсолютной сходимости функции Т(t) , представляющей сумму - функции, как известно, равна нулю, следовательно, для сходимости интеграла (2.44) требуется, чтобы Re s > c. Из выражения (2.44) следует, что дискретное преобразование Лапласа существует для всех функций, для которых существует и обычное преобразование Лапласа.
Вычислить интеграл (2.44) можно, воспользовавшись теоремой о вычетах (теорема Коши), как сумму вычетов подинтегрального выражения в его полюсах, расположенных внутри контура интегрирования, который не должен иметь на себе особенностей подинтегрального выражения. Для этого необходимо замкнуть путь интегрирования. Это можно сделать, добавив к пути интегрирования бесконечно большую полуокружность либо в левой полуплоскости (R -) либо в правой (R +), как показано на рисунке 2.1. При этом получим замкнутый контур Г1, либо Г2.
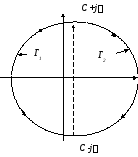
Рисунок 2.1
В первом случае (контур Г1) имеем
 (2.45)
(2.45)
где i – полюсы функции F(s), так как внутри контура Г1 расположены только они.