

Задачи, выносимые на экзамен.
Получение описания системы в виде системы дифференциальных уравнений и дифференциального уравнения высокого порядка.
Получение описания системы в виде системы дифференциальных уравнений в пространстве состояний.
Решение дифференциального уравнения методом вариации произвольных постоянных.
Определение точки равновесия системы.
Линеаризация уравнений с помощью разложения в ряд Тейлора.
Анализ устойчивости по Ляпунову для системы с постоянными коэффициентами.
Построение фазового портрета системы 2-го порядка.
Практические задания для контрольных работ. Задание 1.Получить описание системы в виде дифференциального уравнения
Вариант 1. Система автоматического регулирования температуры в сушильной камере.

Рисунок 1. Принципиальная схема САР температуры в сушильной камере.

Рисунок 2. Функциональная схема САР температуры в сушильной камере.
Объектом регулирования в рассматриваемой системе является сушильная камера СК. Регулируемая величина - заданная температура в сушильной камере,которая устанавливается поворачивающейся заслонкойЗ, приводимой в движение исполнительным механизмом (электродвигателем (Д) с редуктором (Р)). Регулирующий орган - заслонка - изменяет количество подаваемого горячего воздухаQГ, на выходе заслонки - количество греющего агентаQ.
Температура теплоносителя - греющего агента измеряется терморезистором Rtявляющимся в системе чувствительным элементом (ЧЭ). Измерительный мостИМв рассматриваемой системе выполняет функции задатчика и элемента сравнения. "Эталонное" напряжениеuЗ, пропорциональное заданной температуре теплоносителя, устанавливается перемещением движка сопротивленияRЗ. Здесь же происходит сравнение заданного напряжения и напряженияutот терморезистораRtза счет того, чтоRЗ и Rtвключены в разные плечи измерительного моста. Ошибка равна разности напряжений от задатчикаRЗ и чувствительного элементаu1=uЗ-utи пропорциональна отклонению температуры от заданного значения. Для усиления сигнала рассогласования и реализации требуемого закона управления используется управляющее устройствоУУ, которое управляет направлением вращения электродвигателяД.
Система работает следующим образом. Если температура в сушильной камере под действием возмущения отклонится от заданного значения, то на выходе моста появляется сигнал ошибки u1, который через управляющее устройствоУУуправляет реверсивным электродвигателемД. Электродвигатель в зависимости от знака рассогласования перемещает регулируемый органЗв ту или иную сторону, устраняя тем самым рассогласование в системе.
Дифференциальные уравнения элементов системы:
сушильная камера (СК):![]() ;
;
заслонка (З):![]() ;
;
редуктор (Р):![]() ;
;
двигатель (Д):![]() ;
;
управляющее устройство
(УУ):![]() ;
;
чувствительный элемент
(ЧЭ):![]() .
.
Вариант 2. Система автоматического регулирования уровня жидкости.
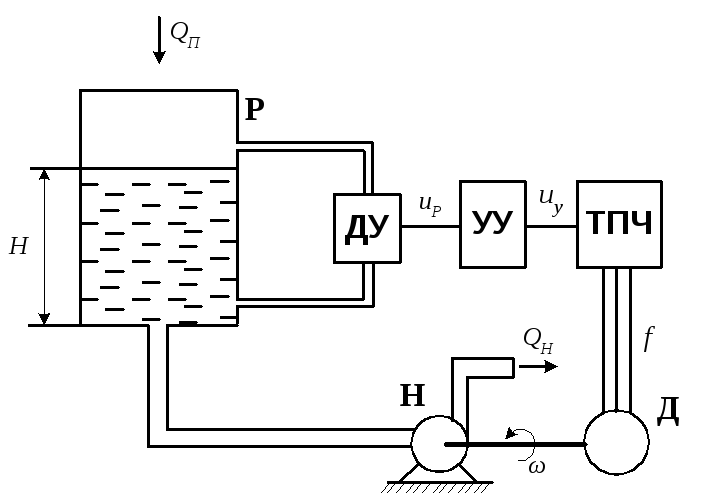
Рисунок 1. Принципиальная схема системы автоматического регулирования уровня жидкости.

Рисунок 2. Функциональная схема системы автоматического регулирования уровня жидкости.
В рассматриваемой автоматической системе поддерживается постоянным уровень жидкости Нв объекте регулирования - резервуареР. Текущее значение регулируемого параметраНизмеряется датчиком уровняДУи сравнивается с заданнымuЗ. Напряжение рассогласованияuРпоступает в управляющее устройствоУУ, которое реализует заданный закон управления и выдает управляющее воздействиеuуна тиристорный преобразователь частотыТПЧ. Тиристорный преобразователь частоты изменяет частотуfнапряжения двигателяДпо закону управляющего воздействияuу. Исполнительным механизмом в рассматриваемой системе выступает насосН, который позволяет изменять расход жидкости из резервуара. Возмущающим воздействием является изменение притока жидкости в резервуар QП. Величина уровня жидкостиНв резервуаре определяется соотношением между величиной притока QПи подачей насоса QН.
Дифференциальные уравнения элементов системы:
резервуар (Р):![]() ;
;
насос (Н):![]() ;
;
асинхронный трехфазный
двигатель (Д):![]() ;
;
тиристорный
преобразователь частоты (ТПЧ):![]() ;
;
управляющее устройство
(УУ):![]() ;
;
датчик уровня (ДУ):![]() .
.
Вариант 3. Система автоматической стабилизации подачи руды.

Рисунок 1. Принципиальная схема системы стабилизации подачи руды.

Рисунок 2. Функциональная схема системы стабилизации подачи руды.
Объектом управления в данной системе является шнековой питатель П, который приводится в движение двигателем постоянного токаД, питающимся от силового магнитного усилителяСМУ.
Количество руды Q, проходящее через питатель в единицу времени, измеряется при помощи весоизмерителяВ, который состоит из короткого ленточного конвейера и магнитоупругого датчикаМД. Количество руды, находящееся на конвейере, пропорционально массовому расходу рудыQ. Следовательно, сила тяжестиFбудет также пропорциональна расходуQ. Электрическое напряжениеuВ, являющееся сигналом текущего расходаQ, сравнивается с задающим напряжениемuЗ. Сигнал разности этих двух напряжений усиливается в усилителеУи поступает на обмотку управления магнитного усилителя.
При изменении плотности и сыпучести руды массовый расход Qбудет отклоняться от заданного значения. При этом возникает сигнал рассогласованияuР, и в зависимости от знака сигналаuРувеличится или уменьшится частота вращения питателя. Положительное или отрицательное приращение скорости компенсирует возникшее ранее отклонение текущего расходаQот заданного значения.
Дифференциальные уравнения элементов системы:
питатель (П):![]() ;
;
редуктор (Р):![]() ;
;
двигатель постоянного
тока (Д):![]() ;
;
силовой магнитный
усилитель (СМУ):![]() ;
;
усилитель (У):![]() ;
;
весоизмеритель (В):![]()
магнитоупругий датчик
(МД):![]() .
.