

(11)Решетчатые функции.
 Непрерывная x(t)
разбивается на дискретные x(0),
x(1)….
Такие функции называются решетчатыми
функциями, а исходная непрерывная
величина x(t)
будет являться огибающее. В случае когда
период решетчатой функции Tn=1
решетчатая функция обозначается x[n]
и функциональное преобразование
решетчатой функции называется дискретным
преобразованием Лапласа или Z
преобразованием. Когда Tn=1
решетчатая функция обозначается x(t)
называется нормализованной. Для
нормализованной решетчатой функции
дискретное преобразование Лапласа
выглядит:
Непрерывная x(t)
разбивается на дискретные x(0),
x(1)….
Такие функции называются решетчатыми
функциями, а исходная непрерывная
величина x(t)
будет являться огибающее. В случае когда
период решетчатой функции Tn=1
решетчатая функция обозначается x[n]
и функциональное преобразование
решетчатой функции называется дискретным
преобразованием Лапласа или Z
преобразованием. Когда Tn=1
решетчатая функция обозначается x(t)
называется нормализованной. Для
нормализованной решетчатой функции
дискретное преобразование Лапласа
выглядит:
![]() , где q-pTn
безразмерная комплексная величина. Для
нормализованной Tn≠1
, где q-pTn
безразмерная комплексная величина. Для
нормализованной Tn≠1
![]() .
Для решетчатой функции справедливы все
свойства преобразования Лапласа.
Дискретные системы могут быть описаны
с помощью конечно-разностных уравнений.
В этом случае производные от непрерывных
функций, соответствие конечной разности
соответствующих порядков для производных
непрерывных функций первого порядка
соответствует конечная разность вида:
.
Для решетчатой функции справедливы все
свойства преобразования Лапласа.
Дискретные системы могут быть описаны
с помощью конечно-разностных уравнений.
В этом случае производные от непрерывных
функций, соответствие конечной разности
соответствующих порядков для производных
непрерывных функций первого порядка
соответствует конечная разность вида:
![]() ,
,
![]() .
.
![]() .
Использование конечной разности
к-порядка дискретную систему (задана
диф. уравнением) можно описать:
.
Использование конечной разности
к-порядка дискретную систему (задана
диф. уравнением) можно описать:
a0∆ky[n]+a1∆k-1y[n]+…+any[n]=b0∆mx[n]+b1∆n-1x[n]+…+bmx[n]. для решения данного уравнения необходимо ввести начальные условия, т.е. y[0], ∆y[0], ∆k-1y[0], т.е. определить или зафиксировать входную величину в момент времени t. Решая данное уравнение можно определить реакцию дискретной системы на любое входное воздействие. Если данное уравнение линейное, то дискретная система тоже линейная. Линейными дифференциальными уравнениями конечных разностях описываются дискретные системы с АИМ. Нелинейные описываются ШИ и ЧИ модуляцией.
(12)Виды квантования.
1)квантование по
времени – при квантовании фиксируется
некоторое значение времени Tn.
 В этих временных интервалах непрерывная
функция x(t)
разбивается на дискретные функции в
момент времени Tn.
2)по уровню – фиксируется величина
данного конкретного уровня и данная
непрерывная величина разбивается на
оси ОУ.
В этих временных интервалах непрерывная
функция x(t)
разбивается на дискретные функции в
момент времени Tn.
2)по уровню – фиксируется величина
данного конкретного уровня и данная
непрерывная величина разбивается на
оси ОУ.
 3)по уровню и времени одновременно –
задается промежуток времени и фиксируется
промежуток q.
Заменяется дискретным значением
соответствующего угла.
3)по уровню и времени одновременно –
задается промежуток времени и фиксируется
промежуток q.
Заменяется дискретным значением
соответствующего угла. При
исследовании цифровой системы достаточно
часто в их схему входит микропроцесс,
который может объединить несколько
контуров, регулирующих параметров
системы. Если регулирование не связанное,
то каждый параметр системы рассматривается
в отдельности. В цифровой системе можно
выделить непрерывную и дискретную
часть. Дискретную часть всех САУ можно
в общем виде:
При
исследовании цифровой системы достаточно
часто в их схему входит микропроцесс,
который может объединить несколько
контуров, регулирующих параметров
системы. Если регулирование не связанное,
то каждый параметр системы рассматривается
в отдельности. В цифровой системе можно
выделить непрерывную и дискретную
часть. Дискретную часть всех САУ можно
в общем виде:![]() ИЭ1 – преобразование непрерывных входных
сигналов в дискретные (квантование по
времени). КЭ – (кодирующий элемент)осуществляет
квантование по уровню. ЦП -
(центральный процессор) –
преобразовывает один дискретный сигнал
в другой по заданному алгоритму. НЭ –
(нелинейный элемент) – преобразование
кодирующий дискретный сигнал в импульсный.
ИЭ2 – (импульсный элемент) разделяет
входные и выходные величины и квантует
выходную величину по времени. Э –
(экстраполятор) преобразует выходную
импульсную величину в последовательную
ступенчатую функцию. В случае, если
квантование по уровню мало или им можно
пренебречь, структурная схема цифровой
САУ.
ИЭ1 – преобразование непрерывных входных
сигналов в дискретные (квантование по
времени). КЭ – (кодирующий элемент)осуществляет
квантование по уровню. ЦП -
(центральный процессор) –
преобразовывает один дискретный сигнал
в другой по заданному алгоритму. НЭ –
(нелинейный элемент) – преобразование
кодирующий дискретный сигнал в импульсный.
ИЭ2 – (импульсный элемент) разделяет
входные и выходные величины и квантует
выходную величину по времени. Э –
(экстраполятор) преобразует выходную
импульсную величину в последовательную
ступенчатую функцию. В случае, если
квантование по уровню мало или им можно
пренебречь, структурная схема цифровой
САУ.
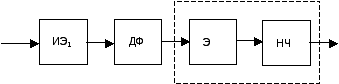 ДФ(дискретный фильтр) – заменяет КЭ,
ЦП, ИЭ2, НЭ. Экстраполятор относится к
непрерывным элементам и в совокупности
с непрерывной частотой САУ обозначают
приведенную непрерывную часть. При
экстраполяции выходного сигнала
используются различные методы, но чаще
всего фиксируется значения амплитуды
в момент поступления сигнала и продолжается
этот уровень на весь период импульса,
т.о. получена последовательная ступенчатая
функция.
ДФ(дискретный фильтр) – заменяет КЭ,
ЦП, ИЭ2, НЭ. Экстраполятор относится к
непрерывным элементам и в совокупности
с непрерывной частотой САУ обозначают
приведенную непрерывную часть. При
экстраполяции выходного сигнала
используются различные методы, но чаще
всего фиксируется значения амплитуды
в момент поступления сигнала и продолжается
этот уровень на весь период импульса,
т.о. получена последовательная ступенчатая
функция.