

Министерство образования и науки Российской федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Балаковский институт, техники, технологии и управления
Двухзонное регулирование электропривода постоянного тока
Методические указания к выполнению лабораторной работы
по дисциплине «Электромеханические системы» для студентов
специальности 210100 всех форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2009
ВВЕДЕНИЕ
Двухзонный электропривод (ЭП) – это такой электропривод, в котором изменение скорости осуществляется как ниже, так и выше номинальной.
Цель работы: исследование двухзонного регулирования для электропривода с двигателем постоянного тока независимого возбуждения (ДПТ НВ).
ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
В электроприводе (ЭП) постоянного тока регулирование ниже номинальной скорости осуществляется за счет изменения напряжения на якоре, а регулирование выше номинальной скорости – за счет ослабления поля двигателя. Поэтому двухзонный электропривод состоит из двух подсистем: одна изменяет напряжение на якоре, другая изменяет поле двигателя. Управление этими подсистемами может быть зависимым и независимым. Современные системы электроприводов зависимые, т.е. ослабление поля начинается при достижении напряжения или ЭДС на якоре номинальных значений.
Работа электропривода с двухзонным регулированием скорости в общем случае характеризуется следующей системой уравнений:
|
|
(1) |
|
|
(2) |
|
|
(3) |
|
|
(4) |
|
|
(5) |
|
|
(6) |
|
|
(7) |
где JΣ – суммарный момент инерции, приведенный к валу двигателя,
кг·м2;
Мс – статический момент нагрузки, Н·м;
М – электромагнитный вращающий момент двигателя, Н·м;
е – ЭДС двигателя, В;
еПР – ЭДС преобразователя, В;
ω – скорость вращения двигателя, с-1;
I – ток якоря двигателя, А;
iВ – ток в обмотке возбуждения, А;
iВТ – вихревые токи, А;
Wв – количество витков обмотки возбуждения;
Ф – магнитный поток, Вб;
s – коэффициент неполного сцепления.
На основании данных уравнений строится структурная схема системы двухзонного регулирования, состоящая из объекта управления (ДПТ НВ) и управляющего устройства (рис.1). На рисунке приняты следующие обозначения:
Uзс – напряжение задания скорости;
РС – регулятор скорости с передаточной функцией Wрс;
РТЯ – регулятор тока якоря с передаточной функцией Wртя;
ТПЯ – тиристорный преобразователь якоря;
kтпя – коэффициент усиления преобразователя якоря;
Тµ – постоянная времени преобразователя якоря;
ДС – датчик скорости с коэффициентом передачи kдс;
ДТЯ – датчик тока якоря с коэффициентом передачи kдтя;

Рис.1. Структурная схема системы двухзонного регулирования
ЯЦ – якорная цепь двигателя;
Rэ – полное сопротивление якорной цепи;
Tэ – электромагнитная постоянная времени двигателя;
JΣ – суммарный момент инерции, приведенный к валу двигателя;
Uзэ – напряжение задания ЭДС;
РЭ – регулятор ЭДС с передаточной функцией Wрэ;
РП – регулятор потока возбуждения с передаточной функцией Wрп;
ТПВ – тиристорный преобразователь возбуждения;
kтпв – коэффициент усиления преобразователя возбуждения;
Тµ – постоянная времени преобразователя возбуждения;
ДЭ – датчик ЭДС с коэффициентом передачи kдэ;
ВМ – выявитель модуля (нужен, т.к. ЭП реверсивный по якорю);
ДП – датчик потока с коэффициентом передачи kдп;
ОВ – обмотка возбуждения;
Твт – постоянная времени вихревых токов;
ТвΣ – суммарная постоянная времени обмотки возбуждения;
RвΣ – полное сопротивление цепи возбуждения;
Iв – ток возбуждения;
Iµ – ток намагничивания (часть тока возбуждения, идущая на создание магнитного потока);
kф – динамический коэффициент связывающий изменение магнитного потока и тока возбуждения (кривая намагничивания двигателя).
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Ознакомиться с теоретическим материалом.
2. Определить расчетные параметры объекта управления и управляющего устройства.
3. Произвести синтез регулятора тока.
4. Произвести синтез регулятора скорости.
5. Произвести синтез регулятора потока.
6. Произвести синтез регулятора ЭДС.
7. Осуществить моделирование двухзонного электропривода в Simulink.
8. Составить отчет по работе.
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
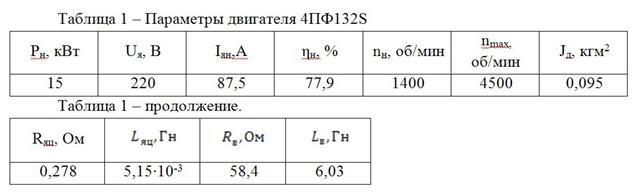
Исходные данные. Исследуется двухзонный электропривод с ДПТ НВ марки 4ПФ132S мощностью 15кВт, параметры которого приведены в таблице 1.

 Двигатель
управляется от электропривода
ЭПУ1М-2-4027Д УХЛ4, параметры которого
приведены в таблице 2. Электроприводы
унифицированные трехфазные серии ЭПУ1М
предназначены для создания реверсивных
и нереверсивных систем управления
двигателями постоянного тока с одно- и
двухзонным регулированием скорости.
Структура условного обозначения
приведена в Приложении.
Двигатель
управляется от электропривода
ЭПУ1М-2-4027Д УХЛ4, параметры которого
приведены в таблице 2. Электроприводы
унифицированные трехфазные серии ЭПУ1М
предназначены для создания реверсивных
и нереверсивных систем управления
двигателями постоянного тока с одно- и
двухзонным регулированием скорости.
Структура условного обозначения
приведена в Приложении.

Поскольку номинальное напряжение двигателя 220В, а электропривод питается от сети 380В используется трансформатор ТС-40, как рекомендуемый производителем к данному приводу. Параметры трансформатора приведены в таблице 3.

1) Определим расчетные параметры объекта управления и управляющего устройства.

 где
ωн – номинальная угловая скорость
двигателя;
где
ωн – номинальная угловая скорость
двигателя;
С – конструктивный коэффициент двигателя;
Iв – номинальный ток обмотки возбуждения (ОВ);
Rэ – полное сопротивление якорной цепи;
Rп – сопротивление преобразователя;
Lэ – полная индуктивность якороной цепи;
kтп – коэффициент усиления тиристорного преобразователя якоря;
kсхя – коэффициент схемы выпрямителя якоря (трехфазная мостовая);
Uуm – максимальное значение напряжения управления;
Тµ – постоянная времени преобразователя якоря;
kтпв – коэффициент усиления тиристорного преобразователя возбуждения; – коэффициент схемы выпрямителя возбуждения (однофазная мостовая);
Тµв – постоянная времени преобразователя возбуждения;
Тв – постоянная времени обмотки возбуждения;
Твт – постоянная времени вихревых токов;
Тэ – электромагнитная постоянная времени двигателя;
JΣ – суммарный момент инерции двигателя и механизма (приведенный к валу двигателя); Тм – электромеханическая постоянная времени двигателя.
2) Произведем синтез регулятора тока.
Структурная схема внутреннего контура тока представлена на рисунке ниже:
 3)
Произведем
синтез регулятора скорости.
3)
Произведем
синтез регулятора скорости.
Структурная схема контура скорости представлена на рисунке ниже:
 где
Wрс – предаточная функция регулятора
скорости; Тт – эквивалентная постоянная
времени контура тока; kдс – коэффициент
передачи датчика скорости; ωmax –
максимальная угловая скорость двигателя
(берем исходя из того что регулирование
осуществляем до скорости 4000 об/мин).
где
Wрс – предаточная функция регулятора
скорости; Тт – эквивалентная постоянная
времени контура тока; kдс – коэффициент
передачи датчика скорости; ωmax –
максимальная угловая скорость двигателя
(берем исходя из того что регулирование
осуществляем до скорости 4000 об/мин).
Синтез регулятора скорости производился в соответствии с симметричным оптимумом.
В двухзонном АЭП
при уменьшении потока уменьшается
коэффициент в объекте регулирования
контура скорости (за счет ослабления
поля двигателя). Если контур скорости
был оптимизирован на модульный оптимум,
то эти изменения вызывают уменьшение
частоты среза и уменьшение быстродействия,
т.е. контур становится более демпфированным.
При существующем уменьшении поля может
произойти даже потеря работоспособности
контура. Для того чтобы коэффициент в
контуре скорости оставался неизменным
при любом значении поля двигателя, на
выходе регулятора скорости устанавливают
делительное
устройство,
как показано на рисунке:

Делительное устройство на выходе РС.