

Задание № 3.1
Реализуйте разомкнутую САР. Изменяя коэффициент усиления усилителя в PI_zveno в допустимых пределах, получите графики выходной величины. Проанализируйте полученные результаты. На основании анализа выставите коэффициент так, чтобы качество регулирования было по возможности наибольшим. Постройте статическую и динамическую характеристику получившейся системы.
Задание № 3.2
Реализуйте САР по возмущению. Изменяя коэффициент усиления датчика и усилителя в PI_zveno в допустимых пределах, получите графики выходной величины. Проанализируйте полученные результаты. На основании анализа выставите коэффициенты так, чтобы качество регулирования было по возможности наибольшим. Постройте статическую и динамическую характеристику получившейся системы.
Задание № 3.3
Реализуйте замкнутую САР. Изменяя коэффициент усиления датчика и усилителя в PI_zveno в допустимых пределах, получите графики выходной величины. Проанализируйте полученные результаты. На основании анализа выставите коэффициенты так, чтобы качество регулирования было по возможности наибольшим. Постройте статическую и динамическую характеристику получившейся системы.
Задание № 3.4
Реализуйте САР с астатическим регулированием. Изменяя коэффициент усиления датчика, усилителя и интегратора в PI_zveno в допустимых пределах, получите графики выходной величины. Проанализируйте полученные результаты. На основании анализа выставите коэффициенты так, чтобы качество регулирования было по возможности наибольшим. Постройте статическую и динамическую характеристику получившейся системы.
Задание № 3.5
Реализуйте комбинированную САР. Изменяя любые коэффициенты усиления в допустимых пределах получите графики выходной величины. Проанализируйте полученные результаты. На основании анализа выставите коэффициенты так, чтобы качество регулирования было по возможности наибольшим. Постройте статическую и динамическую характеристику получившейся системы.
4. Составить отчет по работе.
ВАРИАНТЫ ЗАДАНИЙ
Необходимо провести исследование характеристик электропривода с двигателем постоянного тока независимого возбуждения, охваченного системой автоматического регулирования разнообразной структуры (разомкнутые, по возмущению, замкнутые, астатические, комбинированные) на основе модели, представленной на рис.12. В качестве исходных данных принять следующие:
Электродвигатель имеет характеристики, представленные на рис.25.
Заданная величина оборотов вала двигателя W (таблица 1).
Нагрузочная характеристика строится по точкам X0=0, Y0=0, X1=4, Y1=40, X2=7, Y2=25 (пример - рис.24) согласно таблице 1.

Рис.24 – Пример нагрузочной характеристики
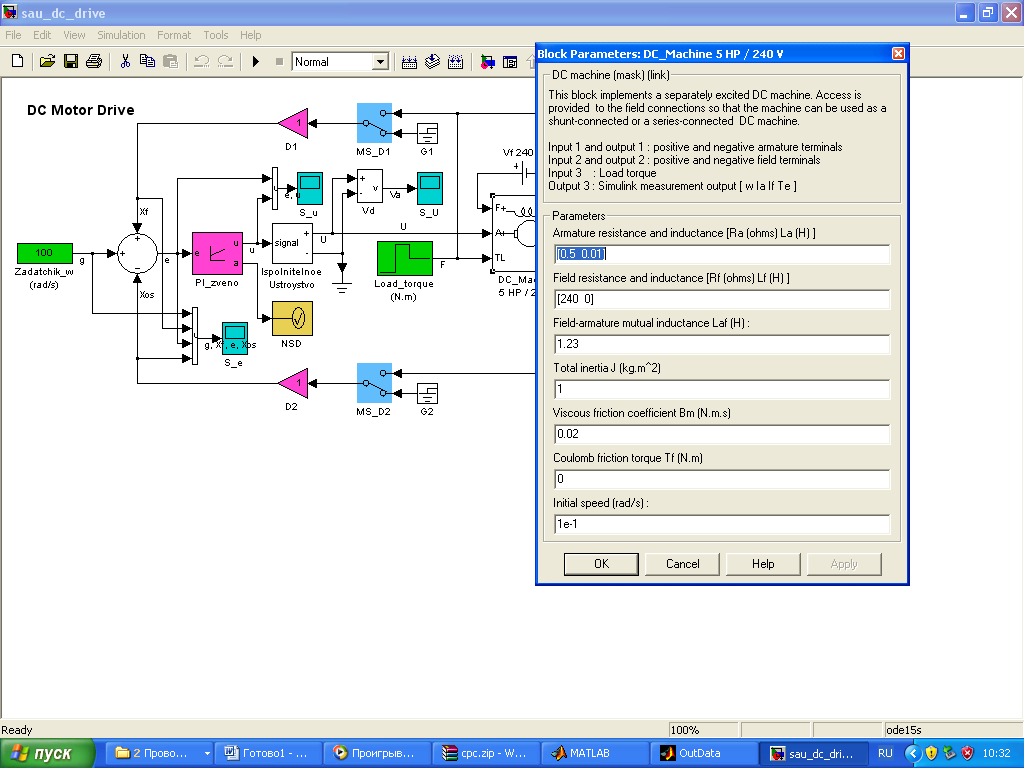
Рис.25 – Параметры электродвигателя
Таблица 1 – Исходные данные
-
Вариант
Данные
w
X0
Y0
X1
Y1
X2
Y2
1
100
0
0
1
10
2,5
7,5
2
100
0
0
1,5
15
3,5
8
3
100
0
0
2
20
4,5
10
4
100
0
0
2,5
25
5,5
15
5
100
0
0
3
30
6
17
6
100
0
0
3,5
35
6,5
20
7
100
0
0
4
40
7
25
8
100
0
0
4,5
45
7,5
30
9
100
0
0
5
50
8
35
10
100
0
0
2,5
55
4,5
25
11
100
0
0
3
60
5,5
35
12
100
0
0
3,5
65
6
40
13
100
0
0
4
70
6,5
45
14
100
0
0
4,5
75
7
55
15
100
0
0
5
80
7,5
65