

Министерство образования и науки Российской федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Балаковский институт, техники, технологии и управления
Исследование систем управления двигателем постоянного тока
Методические указания к выполнению лабораторной работы
по дисциплине «Электромеханические системы» для студентов
специальности 210100 всех форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2009
ВВЕДЕНИЕ
Цель работы: Исследование модели двигателя постоянного тока независимого возбуждения, охваченного системой автоматического регулирования разнообразной структуры (разомкнутые, по возмущению, замкнутые, астатические, комбинированные).
ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Системы управления разделяются на разомкнутые и замкнутые системы. Управление по разомкнутому циклу осуществляется без контроля результата. Такое управление называется жестким. Разомкнутые системы (рис.1) применяются для стабилизации и программного управления.
|
Рис.1– Функциональная схема разомкнутой САР |

На рис.1 ЗУ - задающее устройство; У - усилитель; ИУ - исполнительное устройство; g - задающее воздействие; U- управляющее воздействие; Y- выходная величина; F - возмущающее воздействие.
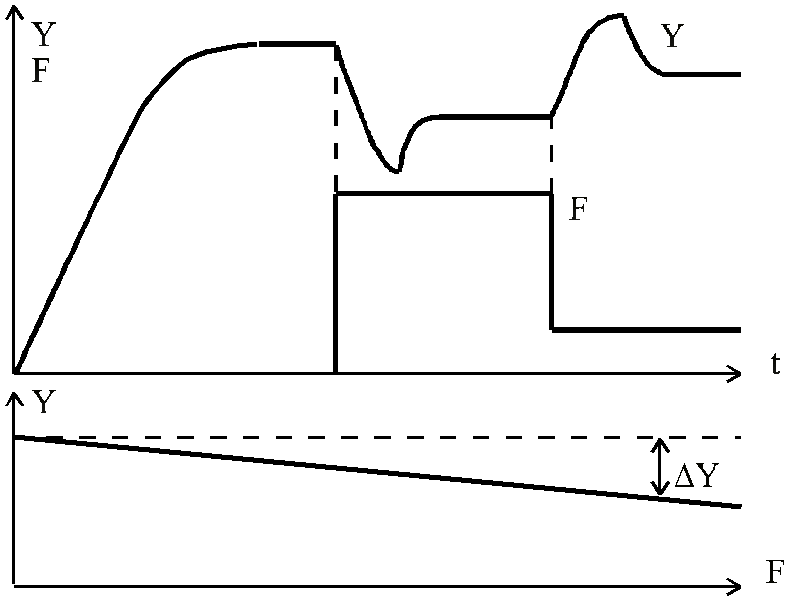
Рис.2 – Изменение выходных величин объекта при изменении возмущающего воздействия. Нагрузочная характеристика
В установившемся режиме работы свойства системы можно охарактеризовать с помощью нагрузочной характеристики (рис.2). Нагрузочная характеристика представляет собой зависимость выходной величины системы от возмущающего воздействия Y=f(F).
В разомкнутой системе нагрузочная характеристика - это характеристика объекта. Она не зависит от других элементов (усилителя, исполнительного устройства). Любые изменения возмущающего воздействия вызывают изменения выходной величины. Разомкнутую систему можно оценить по величине отклонения выходного сигнала ΔY под влиянием возмущающего воздействия F.
Системы автоматического управления по возмущению (системы компенсации). Разомкнутые системы с управлением по возмущению (рис.3) характерны тем, что управляющий сигнал формируется в зависимости от величины основного возмущающего воздействия. Эти системы предназначены для уменьшения влияния возмущающего воздействия на выходную величину объекта управления путем измерения самого этого воздействия и компенсации его влияния за счет искусственного воздействия на процесс.

Рис.3 – Функциональная схема САР по возмущению
На рис.3: Д - датчик возмущающего воздействия, хf - сигнал пропорциональный возмущающему воздействию, z - сигнал на входе усилителя. В рассматриваемой системе:
z=g+xf. (1)
Можно считать, что сигнал хf связан с возмущающим воздействием соотношением:
хf =kf·F, (2)
где kf - коэффициент передачи датчика.


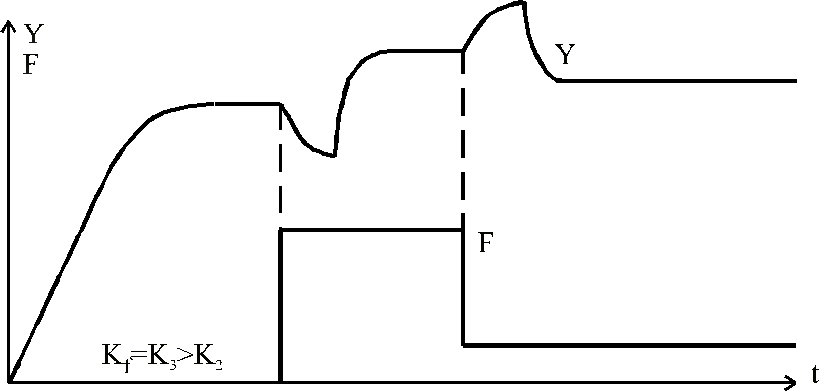
Рис.4 – Изменение выходного сигнала при изменении возмущающего воздействия при различных значениях коэффициента k
Из рассмотрения кривых видно, что система управления по возмущению имеет семейство нагрузочных характеристик (рис.5). В рассматриваемой системе нагрузочные характеристики зависят не только от свойств объекта, но и от свойств устройств управляющей части системы. Подбирая коэффициент усиления усилителя или коэффициент передачи датчика можно получить необходимую нагрузочную характеристику системы.
Достоинства систем управления по возмущению:
1) В системах управления по возмущению можно добиться полной компенсации влияния возмущающего воздействия на выходную величину в установившемся режиме работы.
2) Эти системы должны быстро реагировать на меняющееся возмущающее воздействие, так как изменение сигнала на выходе усилителя происходит одновременно с изменением возмущающего воздействия.

Рис.5 – Семейство нагрузочных характеристик САР
Недостатки систем управления по возмущению:
1) В системах управления на объект действует несколько возмущающих воздействий. Те возмущения, которые не измеряются, будут вызывать изменение выходной величины.
2) Трудность измерения возмущающих воздействий. В ряде случаев возмущающие воздействия трудно измерить, например, момент сопротивления на валу двигателя.
В замкнутых САР (рис.6) управляющее воздействие U формируется в непосредственной зависимости от управляемой величины Y.

Рис.6 – Функциональная схема замкнутой САР
В замкнутой системе сигнал с выхода датчика Д, измеряющего выходную величину, поступает на вход системы. Такая связь входа системы с его выходом называется обратной связью. Сигнал на входе усилителя равен:
ε=g-xос,
где ε - отклонение сигнала обратной связи xос от задающего воздействия.
Если из задающего воздействия g вычитать выходную величину Y, то ε будет представлять отклонение регулируемой величины от заданного значения.
Рассмотрим, как могут изменяться координаты системы: ε - отклонение, U - управляющее воздействие, Y - выходная величина при включении системы в работу и при изменении возмущающего воздействия F.

Рис.7 – Изменение координат системы
Будем полагать, что зависимости получены при коэффициенте усиления усилителя k1. Работу системы можно описать следующим образом. При включении системы, когда xос=0, величина отклонения ε имеет максимальное значение. Управляющее воздействие U начинает увеличиваться, вследствие чего увеличивается выходная величина Y. По мере увеличения Y отклонение ε уменьшается и наступает установившийся режим работы.
Увеличение F вызывает уменьшение выходной величины Y и увеличение отклонения ε, что приводит к увеличению управляющего воздействия U и, следовательно, к увеличению выходной величины. Однако Y не может достичь прежнего значения, так как увеличение управляющего воздействия возможно лишь при увеличении ε.
Увеличим коэффициент усиления усилителя. Пусть k2>k1. Рассмотрим изменение координат в этом случае. В замкнутой системе управляющее воздействие U формируется в функции отклонения ε. Замкнутые системы называются системами автоматического регулирования по отклонению.

Рис.8 – Нагрузочные характеристики замкнутой САР
На рис.8: 1 - нагрузочная характеристика САР при коэффициенте усиления k1; 2 - нагрузочная характеристика САР при коэффициенте усиления k2, причем k2>k1.
В замкнутой системе регулирования, выбирая необходимое значение коэффициента усиления можно получить требуемую нагрузочную характеристику. В рассмотренной системе с увеличением возмущающего воздействия уменьшается выходная величина. Каждому новому значению возмущающего воздействия соответствует новое значение выходной величины. Такое регулирование называется статическим. Система автоматического регулирования, имеющая подобную нагрузочную характеристику, называется статической системой. В замкнутой системе отклонение равно
Ε=g-xос. (3)
Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
При астатическом регулировании (рис.9) выходная величина в установившемся режиме работы не зависит от возмущающего воздействия.
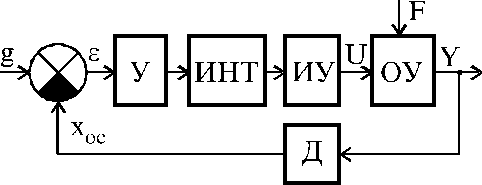
Рис.9 – Функциональная схема астатической системы
В этих системах отсутствует пропорциональная связь в установившемся режиме работы между управляющим воздействием и величиной отклонения. Включим в систему устройство, у которого выходная величина связана с входной следующей зависимостью:
![]() .
.

Рис.10 – Изменение координат системы
Увеличение F вызывает уменьшение выходной величины Y и увеличение отклонения ε, что приводит к увеличению управляющего воздействия U и, следовательно, к увеличению выходной величины.
На рис.9 «ИНТ» - интегрирующее устройство. Представим, как могут изменяться координаты системы: ε - отклонение, g - управляющее воздействие, Y - выходная величина при включении системы в работу и при изменении возмущающего воздействия.
В рассматриваемой системе установившийся режим работы возможен лишь в том случае, когда величина отклонения равна нулю. Только в этом случае выходная координата интегрирующего устройства не будет изменяться. Нагрузочная характеристика системы будет иметь вид прямой, параллельной оси возмущающего воздействия.
Системы, в которых установившееся значение выходной величины не зависит от возмущающего воздействия, называются астатическими. Регулирование называется астатическим. Регулятор и объект называются астатическими, если они обладают способностью интегрировать входной сигнал.
Комбинированные системы (рис.11) автоматического регулирования представляют совокупность двух систем: САР по отклонению и САР по возмущению. В такой системе сигнал на входе усилителя равен:
z=g-xoc+xf. (4)

Рис.11 – Функциональная схема комбинированной САР