

2 Электропривод постоянного тока
История привода постоянного тока.
Генератор - двигатель.
ЭМУ – двигатель
Полупроводниковый преобразователь(транзисторный)– двигатель
Тиристорный – преобразователь – двигатель
IGBT транзисторный преобразователь- двигатель
С цифровым управлением.
(Insulated Gate Bipolar Transistor — биполярный транзистор с изолированным затвором)
Цифровой управляемый выпрямитель – двигатель
Специализированный контроллер – вентильный двигатель
Как следует из вышесказанного, центральное место среди всех устройств автоматики занимает электропривод, а главным его элементом является двигательное устройство (исполнительное устройство). Исторически сложилось так, что самым широко распространенным исполнительным устройством систем автоматического управления является электродвигатель. В приборостроении речь идет о микродвигателях или электрических микромашинах. Рассмотрим, какие же требования предъявляются к микромашинам систем автоматики приборного типа. Различают две группы требований.
Общие требования:
высокие энергетические показатели коэффициент полезного действия и коэффициент мощности;
высокая надежность;
низкая стоимость;
простота конструкции и технологии изготовления;
ремонтопригодность;
стабильность выходных характеристик;
высокое быстродействие;
линейность характеристик и широкий диапазон регулирования.
Требования в зависимости от области применения и условий эксплуатации:
минимальные габариты и вес при заданных выходных параметрах;
устойчивость к вибрациям и ударным нагрузкам;
климатическая и радиационная устойчивость;
взрывобезопасность;
низкий уровень создаваемых шумов (акустических и электромагнитных).
Все приведенные требования, как правило, учитываются при выборе типа исполнительного устройства, при решении любой конкретной задачи.
Электродвигатели
Электродвигатели, применяемые в системах автоматики и телемеханики, вычислительной техники, имеют номинальную механическую мощность от сотых долей ватта, примерно, до
600700 Вт.
По конструкции и принципу действия их подразделяют на коллекторные, асинхронные и синхронные.
Коллекторные двигатели бывают:
постоянного тока;
переменного тока;
универсальные, способные работать как от сети постоянного тока, так и от сети переменного тока.
По конструкции якоря коллекторные микродвигатели постоянного тока делятся на три группы: 1) с барабанным якорем;
2) с полым немагнитным якорем; 3) с дисковым якорем. Наряду с микродвигателями со скользящим контактом коллектор - щетки распространены бесконтактные двигатели постоянного тока.
Асинхронные двигатели в системах автоматики применяются в трех вариантах: 1) с короткозамкнутым ротором типа "беличья клетка";
2) с полым немагнитным ротором; 3) с полым магнитным ротором.
Синхронные двигатели используются в тех случаях, когда требуется строгое постоянство скорости вращения. Наибольшее распространение в автоматике получили реактивные, гистерезисные и двигатели с активным ротором.
Двигатели постоянного тока
Основные характеристики двигателей постоянного тока
Прежде чем рассматривать характеристики двигателей постоянного тока, приведем некоторые аналитические зависимости, необходимые нам для их формализации.
В первую очередь нужно иметь уравнение для электрического контура "обмотка якоря - сеть". Воспользовавшись 11 законом Кирхгофа, запишем для данного контура уравнение вида:
![]() , (2.1)
, (2.1)
где Uс - напряжение питания сети,
Iя - ток якоря,
Rя - суммарное активное сопротивление всех обмоток якоря,
Uщ - падение напряжения на щетках якоря.
Если считать, что падение напряжения на счетках постоянно, то тогда можно ввести обозначение: U=Uс-Uщ и записать выражение в виде :
![]() . (2.2)
. (2.2)
Если Е>U, то ток Iя совпадает по направлению с эдс Е и машина работает в генераторном режиме.
Если Е<U, то ток Iя меняет свой знак и будет направлен против эдс Е и машина будет работать в двигательном режиме.
При работе как в двигательном, так и в генераторном режиме величины эдс Е и электромагнитного момента М определяют по формулам:
![]() ,. (2.3)
,. (2.3)
![]() , (2.4)
, (2.4)
где се=см= pN/2a - конструктивные постоянные электрической машины.
(р - число пар полюсов, N - число активных проводников обмотки якоря, а - число параллельных ветвей.)
- угловая скорость вращения якоря.
Теперь назовем основные характеристики электродвигателей, определяющие качество работа и производительность в установившемся режиме.
Механическая характеристика - зависимость угловой скорости вращения от электромагнитного момента =f(M) в установившемся режиме.
Электромеханическая характеристика (скоростная) - зависимость угловой скорости вращения от тока якоря =f(Iя) в установившемся режиме.
Моментная характеристика - зависимость электромагнитного момента от тока якоря M=f(Iя) в установившемся режиме.
Выражение для механической характеристики можно получить следующим образом: из уравнения 2.3 следует, что =Е/ceФ,
из уравнения 2.4 - Iя=М/смФ, а из уравнения 2.2 Е=U-IяRя, тогда после подстановки имеем:
![]() , (2.5)
, (2.5)
где
![]() =0
- угловая скорость холостого хода.
=0
- угловая скорость холостого хода.
Электромеханическая характеристика:
 . (2.6)
. (2.6)
Моментная характеристика представлена уравнением 2.4.
Механические характеристики полностью определяют качество работы электромеханического устройства в установившемся режиме.
Используют понятия "естественной" и "искусственной" механических характеристик. Естественные механические характеристики двигатели имеют при номинальных параметрах питающей сети, нормальных схемах включения и отсутствии добавочных сопротивлений в цепях машины. Все другие механические характеристики являются искусственными.
По степени влияния момента нагрузки на изменение скорости вращения, которое характеризуется коэффициентом крутизны ,
![]() , (2.7)
, (2.7)
г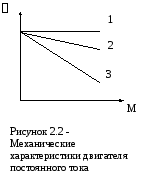 де
де![]() ,
,![]() ,
,
приращение скорости,
ном номинальная скорость вращения,
М приращение момента,
Мном номинальный момент вращения.
Все механические характеристики подразделяют на три группы:
Абсолютно жесткие характеристики 0
Жесткие характеристики имеют в пределах 1 - 10 %.
Мягкие механические характеристики 10%