

8 Определение характеристик следящего привода
Определим вид передаточных функций всех элементов, входящих в следящий привод, а также передаточную функцию КУ.
Передаточная функция привода:
![]()
Передаточная функция двигателя:
![]()
Передаточная
функция усилителя:
![]()
Передаточная
функция измерителя рассогласования:
![]()
Передаточная
функция редуктора:
![]()
Передаточная функция КУ:

Построим переходные процессы для следящего привода с КУ и без него. Определим прямые оценки качества этих систем.
Переходный процесс для следящего привода без КУ.
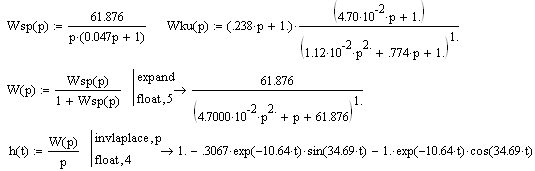
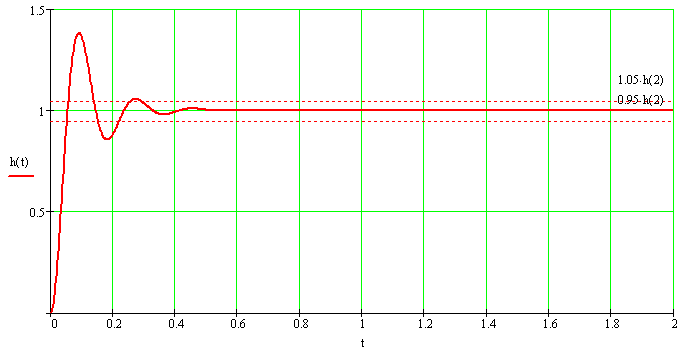
Рисунок 9 – Переходный процесс следящего привода без КУ
Прямые характеристики:
-
время регулирования,
 =
0,295 с;
=
0,295 с; -
перерегулирование

-
время нарастания регулируемой величины
-
время первого согласования – 0,052 с.
Переходный процесс для следящего привода с КУ.
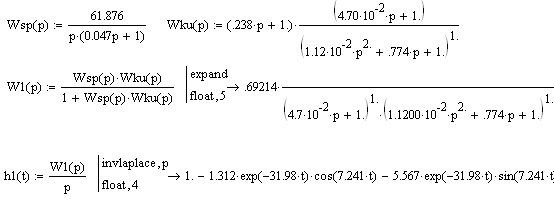

Рисунок 10 – Переходный процесс следящего привода с КУ
Прямые характеристики:
-
время регулирования,
 =
0,395 с;
=
0,395 с; -
перерегулирование

-
время нарастания регулируемой величины
-
время первого согласования – 0,091 с.
Заключение
В ходе выполнения практической работы рассчитан следящий привод, удовлетворяющий ТЗ. Проведен анализ системы следящего привода с корректирующим устройством и без него. Анализ показывает, что корректирующее устройство улучшает устойчивость, уменьшает быстродействие системы и уменьшает её ошибку.