

Кинематическая модель сферы (эллипсоида)
Модель представлена системой уравнений
x = (a2z2)
sin
(80z),
= (a2z2)
sin
(80z),
y = (b2z2) cos (80z),
z = N, …, N.
где a и b – размеры эллипсоида по осям x и y соответственно, N – некоторое численное значение по оси z, которым ограничивается эллипсоид. Задавая значения N можно формировать как полную, так и часть поверхности. При равенстве a и b будет сфера, при неравных значениях будет эллипсоид.
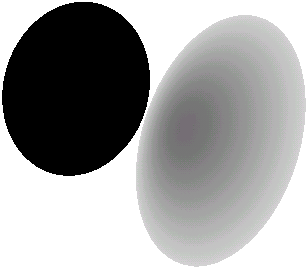
Поверхность образуется пространственной линией при движении по оси z с определенным шагом. На рис.1.34 намеренно взят большой шаг для того, чтобы показать механизм построения.
На рис.1.35 слева показана сфера, в которой множитель перед z равен 160; справа изображена та же фигура, но она значительно уплотнилась за счет того, что вышеупомянутый множитель приравнен 4000.
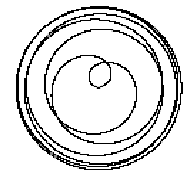
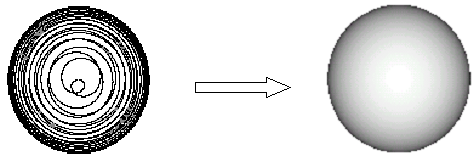
Рис. 1.34 Рис. 1.35
Кинематическая модель однополостного гиперболоида
Модель представлена системой уравнений
x = (a
2+z2)
sin
(80z),
= (a
2+z2)
sin
(80z),
y = (b 2+z2) cos (80z),
z = N, …, N.
где a и b – размеры горловины гиперболоида по осям x и y соответственно, N – некоторое значение по оси z которым ограничивается фигура. При равенстве a и b будет круговой гиперболоид, при неравных значениях будет эллиптический гиперболоид.
Здесь N определяет длину гиперболоида, в отличие от случая со сферой, так как он представляет бесконечную форму. И ограничение по z влияет не только на размер рассчитываемого пространства, но и на вид получаемой фигуры. Для лучшей наглядности выполним поворот поверхности в пространстве вокруг всех трех осей системы координат на 30 градусов (рис.1.36).
У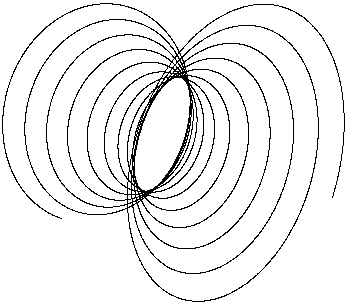
 меньшив
шаг построения, получаем гиперболоид
на рис.1.37.
меньшив
шаг построения, получаем гиперболоид
на рис.1.37.
Рис. 1.36 Рис.1.37
Кинематическая модель двуполостного гиперболоида
Модель представлена системой уравнений
x = (-a
2+z2)
sin
(80z),
= (-a
2+z2)
sin
(80z),
y = (-b 2+z2) cos (80z),
z = N, …, N.
где a и b – размеры «чаш» гиперболоида по осям x и y соответственно, N – некоторое значение по оси z, которым ограничивается гиперболоид. При равенстве a и b будет круговой гиперболоид, при неравных значениях будет эллиптический гиперболоид.
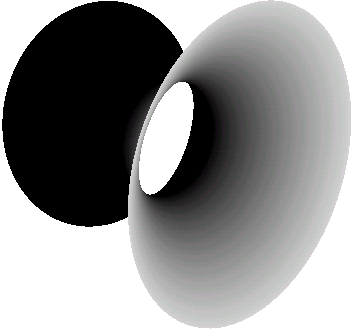
С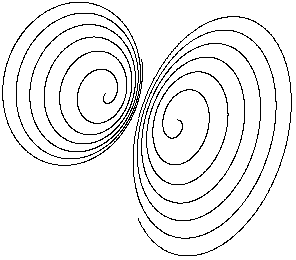
 большим шагом построения двуполостный
гиперболоид показан на рис.1.38. С малым
шагом построения двуполостный гиперболоид
показан на рис.1.39.
большим шагом построения двуполостный
гиперболоид показан на рис.1.38. С малым
шагом построения двуполостный гиперболоид
показан на рис.1.39.
Рис. 1.38 Рис.1.39
Кинематическая модель конуса второго порядка
Модель представлена системой уравнений
 x
= а z
sin(z)
x
= а z
sin(z)
y = b z cos(z) ,
z = -N … N
где N – некоторое значение по оси z, которым ограничивается конус. При равенстве a и b будет круговой конус, при неравных значениях будет эллиптический конус.
С большим шагом построения конус показан на рис.1.40. С малым шагом построения конус показан на рис.1.41.
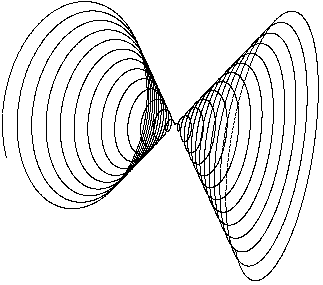
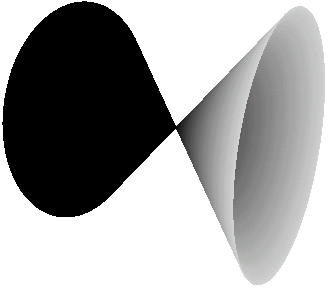
Рис. 1.40 Рис. 1.41