7. Разработка самонастраивающейся системы электропривода.
В процессе управления меняются параметры звеньев системы, влияющие на динамические свойства. А так как по заданию максимальное отклонение графика кривой переходного процесса выходной координаты системы электропривода от заданной на любой скорости двигателя не должно составлять более 5% текущего значения. Таким образом, можно сделать вывод о необходимости применения самонастройки. Схема самонастройки изображена на рисунке:
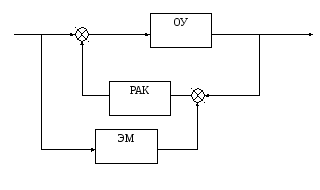
где ОУ - объект управления;
ЭМ - эталонная модель.
В качестве эталонной модели выберем колебательное звено с перерегулированием σ=5% со следующей передаточной функцией:
![]()
где коэффициент передачи эталонной модели:
![]()
а постоянная времени эталонной модели Т=0.13 с (определяется из равенства результирующей постоянной времени электропривода).
Применим пропорциональный регулятор с передаточной функцией:
![]()
где k=0.1.
8. Анализ переходных процессов.
Переходные процессы скорости двигателя при изменении управляющего воздействия на 0.05 В на скоростях :
а) w=0.1*wн
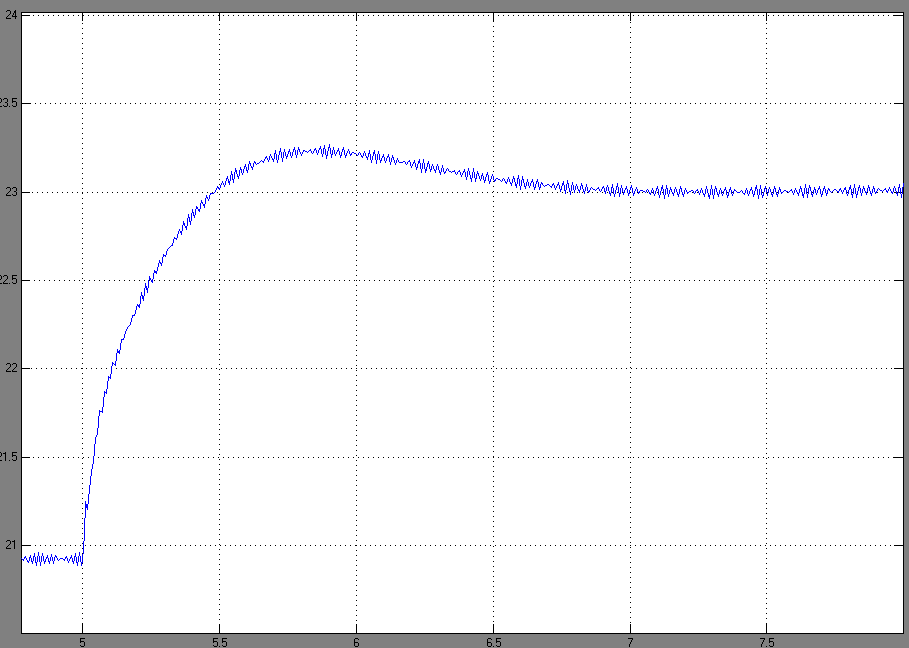
б) w=0.9*wн
а) w=1.1*wн
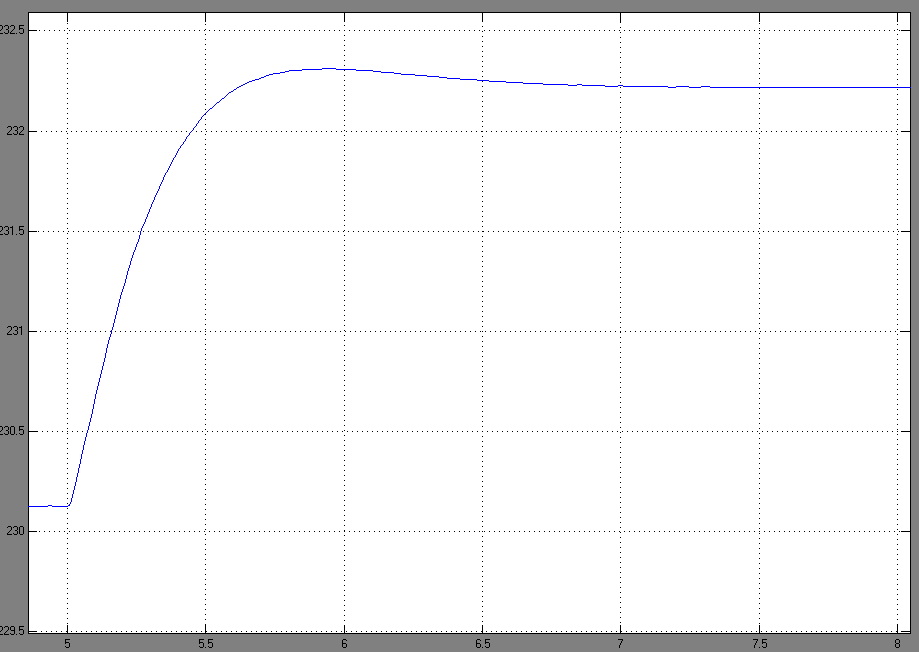
а) w=1.9*wн
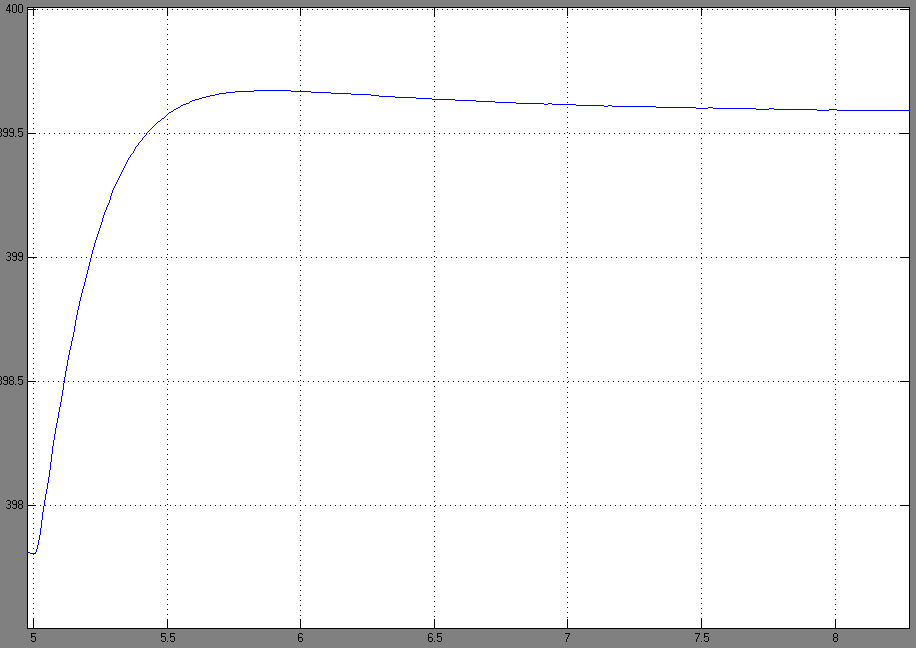
Как видно из графиков максимальное отклонение графика кривой переходного процесса скорости электропривода от заданной на любой скорости двигателя составляет не более 5%.
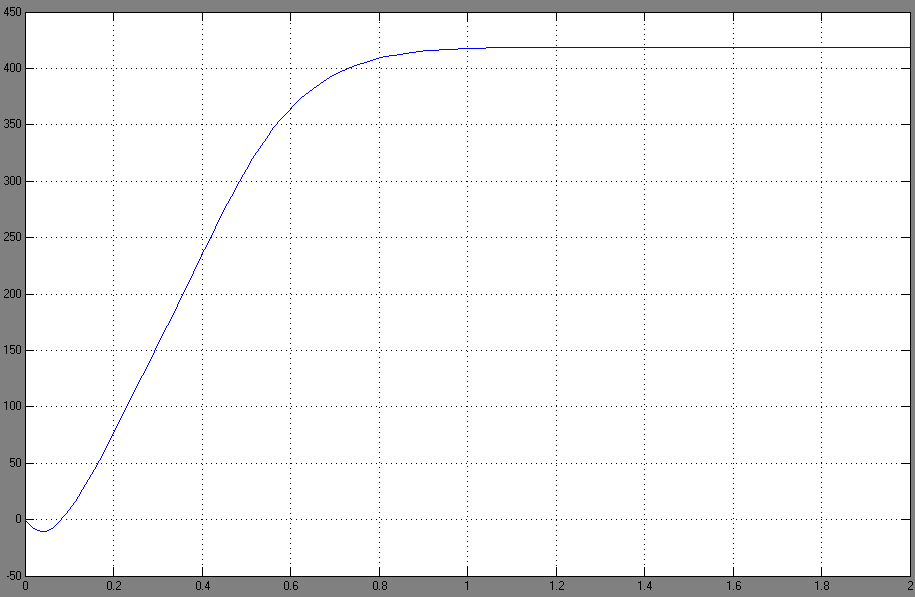
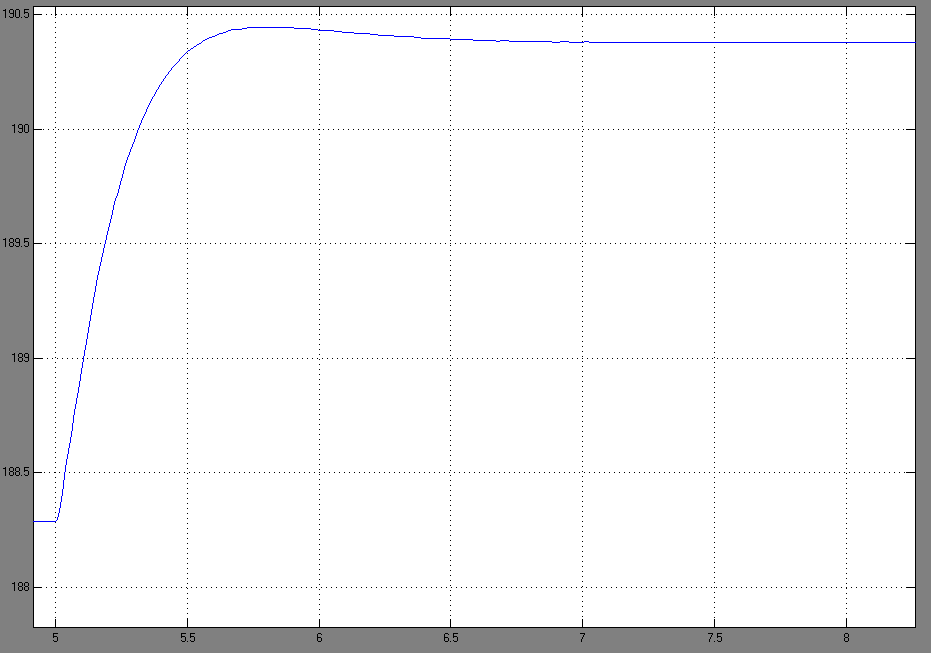
Переходный процесс скорости двигателя при пуске системы от нуля до максимального значения скорости двигателя (разгонная характеристика).
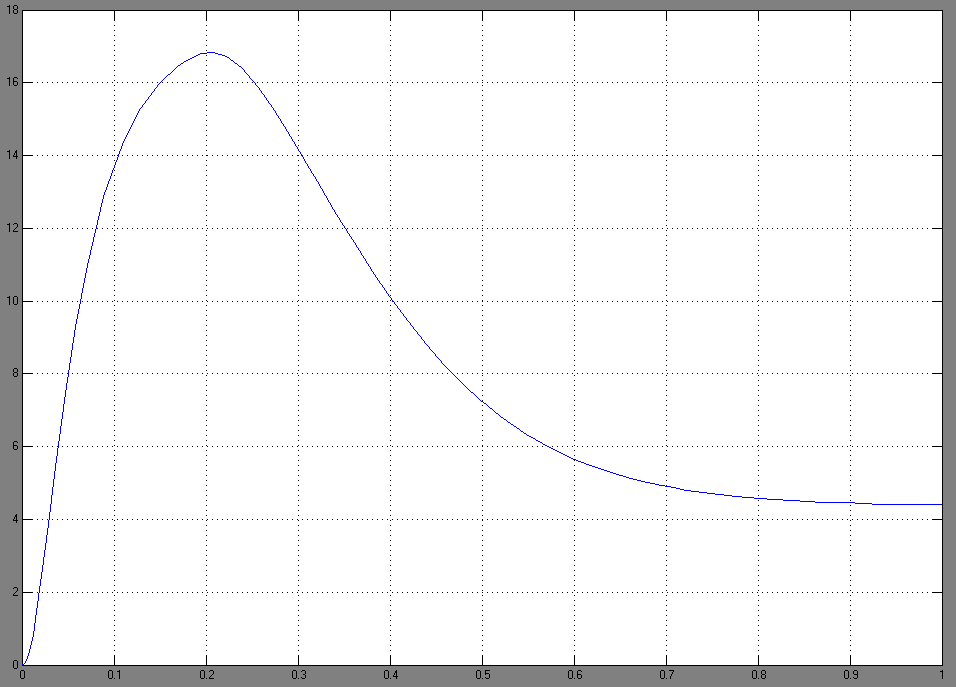
Переходный процесс тока якоря двигателя при пуске системы от нуля до максимального значения скорости двигателя.
Система автоматизированного электропривода является астатической. На графиках ЛЧХ при синтезе регулятора скорости и ЭДС видно, что у скорректированных систем имеется -20 дб/дек, что свидетельствует о том, что спроектированная система является астатической. В астатической системе статическая ошибка равна нулю. Таким образом, условие статической ошибки ∆з<0.5% выполняется во всём диапазоне регулирования.
9. Разработка схемы электрической принципиальной.
Регулятор тока якоря.
Регулятор тока якоря имеет передаточную функцию:
![]()
Техническая реализация данного звена представлена на рисунке:
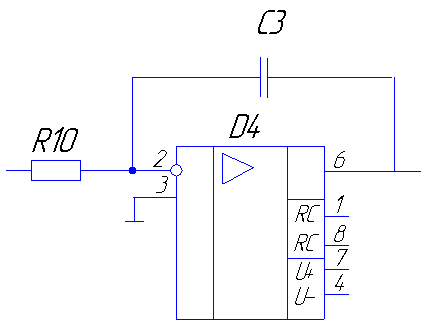
Произведём расчёт параметров звена:
R10=100 кОм
С3=10/R10=1 мкФ.
Регулятор скорости.
Регулятор скорости имеет передаточную функцию:
![]()
Техническая реализация данного звена представлена на рисунке:
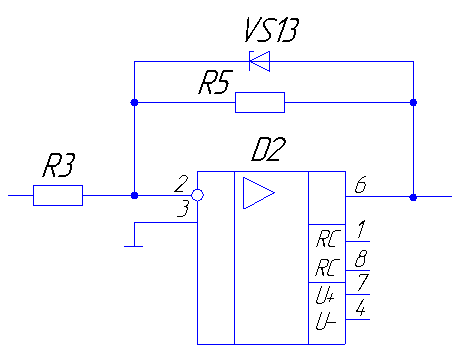
Произведём расчёт параметров звена:
R3=1 кОм
R5=R3*12.6=12.6 кОм.
Принимаем R5=12 кОм
Стабилитрон VS13 выбран с напряжением стабилизации 20 В.
Регулятор тока возбуждения.
Регулятор тока возбуждения имеет передаточную функцию:
![]()
Техническая реализация данного звена представлена на рисунке:
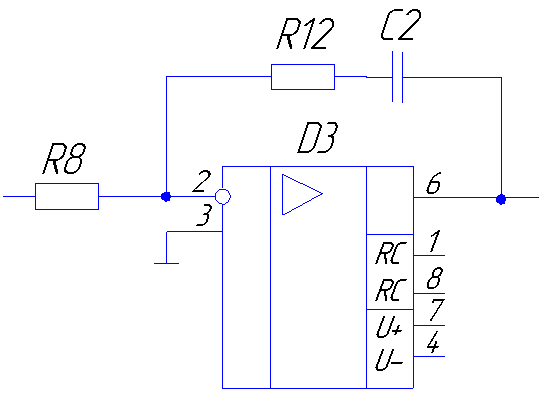
Произведём расчёт параметров звена:
R12=100 кОм
R8=R12/1.2=82 кОм
С2=0.15/R12=1.5 мкФ.
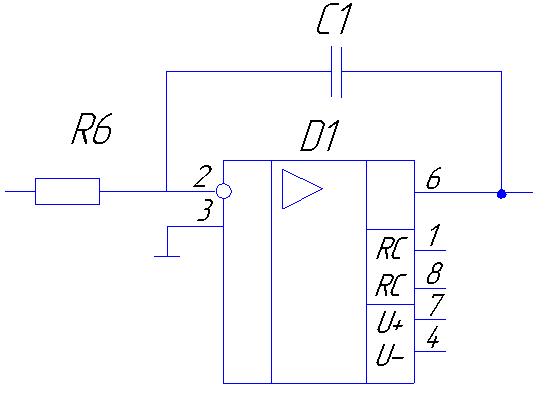
Регулятор ЭДС.
Регулятор ЭДС имеет передаточную функцию:
![]()
Техническая реализация данного звена представлена на рисунке:
Произведём расчёт параметров звена:
R6=100 кОм
С1=17 мкФ.
Примем С!=18мкФ
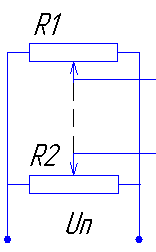
При подаче напряжения от тахогенератора к цепи управления необходимо снизить напряжение до 10 В. Для этого применён делитель напряжения:
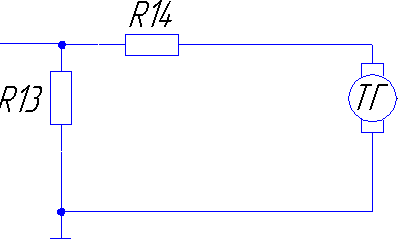
Рассчитаем параметры делителя.
R14=10 кОм
R13=0.143*R14=1.43 кОм
Примем R13=1.5 кОм
В данной схеме применён задатчик на основе сдвоенные резисторы. Движки соединены между собой механически.