

5.2. Определение передаточные функции звеньев цепи возбуждения.
Схема замещения цепи возбуждения двигателя постоянного тока изображена на рисунке:
UВ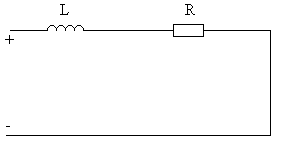
Уравнение электрического равновесия для этой схемы имеет вид:
![]()
Уравнения, описывающие зависимость тока возбуждения от магнитного потока имеют вид:
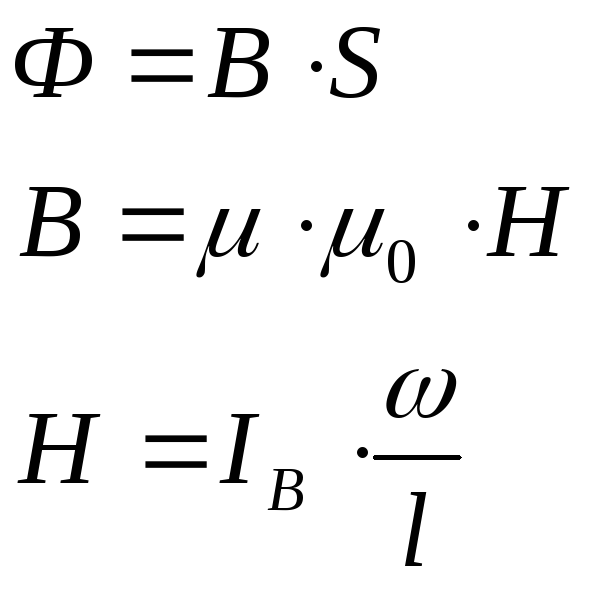
Определим площадь полюса двигателя МИ31
Зная длину и ширину полюса двигателя Х, определим эти показатели для двигателя МИ31
Двигатель Х Двигатель МИ31
![]() мм
мм
![]() мм
мм
![]() мм
мм
![]() мм
мм
![]() мм
мм
![]() мм
мм
![]() мм
мм
![]() мм
мм
Определим площадь полюса двигателя МИ31по формуле:
![]() мм2
мм2
Если магнитная индукция B=1.6 Тл, то номинальный магнитный поток равен:
![]() мВб
мВб
Определим коэффициент k, для этого определим длину и диаметр катушки:
![]() мм
мм
![]() мм
мм
![]()
Из таблицы определим коэффициент k:
-

0.1
0.5
5
10
k
0.2
0.5
0.6
1
Примем коэффициент k=0.5.
Определим минимальный магнитный поток.
Частота вращения двигателя изменяется в пределах: w=0…wmax, где
wmax=2*wном=2*209.33=418.66 рад/с
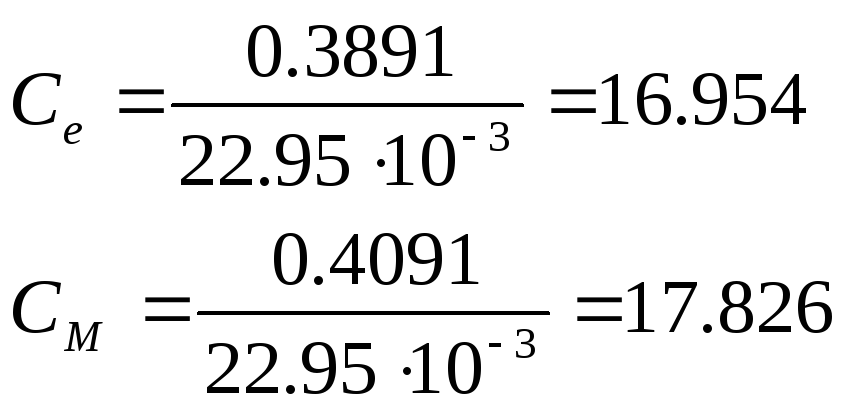
Определим коэффициенты Се и См:
СеФ=0.3891
СмФ=0.4091
Фном=22.95 мВб откуда:
![]() мВб
мВб
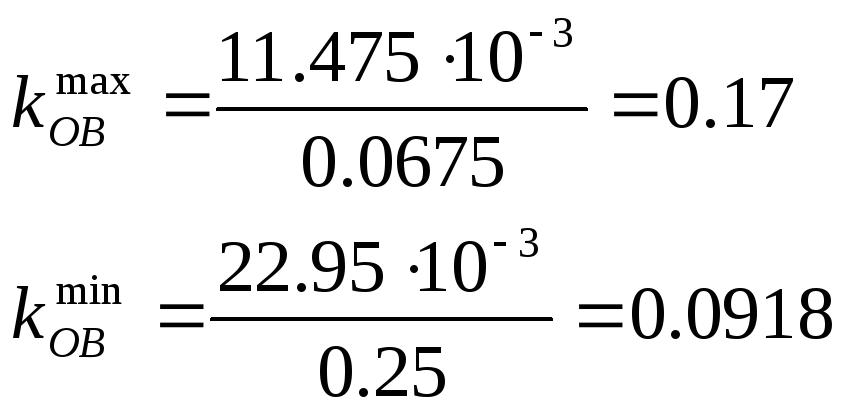
По кривой намагничивания определим максимальный и минимальный токи возбуждения:
![]()
Таким образом, коэффициент передачи будет нелинеен, изменяясь в пределах:
Напряжение на обмотке возбуждения:
![]() В
В
Минимальное напряжение управления в цепи обмотки возбуждения определим по регулировочной характеристике тиристорного преобразователя:
![]() В
В
Таким образом, напряжение управление в цепи обмотки возбуждения изменяется в пределах:
![]() В
В
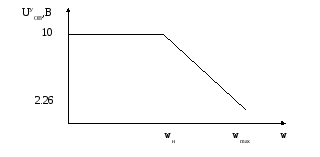
Напряжение управление на обмотке возбуждения будет иметь следующий вид:
Связь между потоком возбуждения и током возбуждения описывается формулой:
![]()
А индуктивность обмотки возбуждения определим по формуле:
![]()
Заменим дробь в выражении для индуктивности обмотки возбуждения отношением Ф/IОВ:
![]() Гн
Гн
Определим постоянную времени цепи возбуждения из выражения:
![]() c.
c.
5. 3. Определение передаточной функции тиристорного преобразователя цепи якоря.
Передаточная функция тиристорного моста вместе с системой импульсно-фазового управления СИФУ, как правило, аппроксимируется апериодическим звеном первого порядка с постоянной времени Тт.п в пределах от 0,006 до 0,01 с., что обусловлено дискретностью подачи отпирающих импульсов и особенностью работы управляемого тиристорного выпрямителя (тиристорного преобразователя).
![]() ,
(22)
,
(22)
где Uт.п – выходное напряжение тиристорного преобразователя;
Uу – напряжение, подаваемое на вход СИФУ тиристорного преобразователя;
Кт.п – коэффициент передачи тиристорного преобразователя.
Следует отметить, что коэффициент тиристорного преобразователя не является величиной постоянной и изменяется в зависимости от величины управляющего напряжения. Для пилообразного опорного напряжения:
![]()
Таким образом, зависимость Uтп=f(Uу) можно представить на графике:
5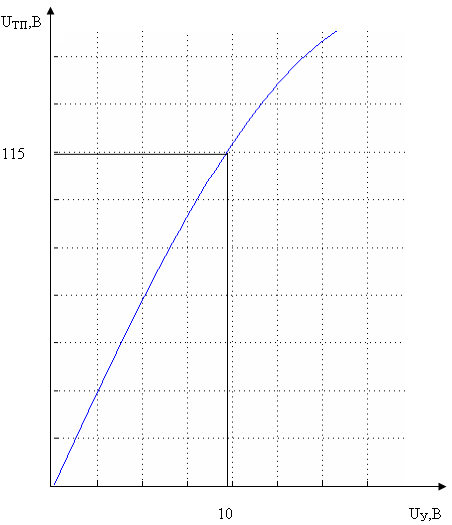
Проводя касательную в начале и в конце графика можно определить максимальный и минимальный коэффициент передачи тиристорного преобразователя. Максимальный коэффициент необходим для определения стабильности системы, а минимальный для определения точности системы.
![]()
![]()
Принимая во внимание, что Ттп=0,007 с. передаточная функция тиристорного преобразователя будет иметь вид:
![]()
![]()
Преобразователь получает энергию от промышленной сети, величина напряжения сети, согласно заданию, не является постоянной, а выходная координата зависит от напряжения сети, следовательно, выходная координата может изменяться независимо от сигнала управления. Коэффициента передачи тиристорного преобразователя при изменении напряжения питания +10%...-15% от номинального будет изменяться в пределах:
![]()
![]()