

курсовая работа / kp
.doc1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Разработать и рассчитать следящий привод, обеспечивающий слежение объектом регулирования за углом поворота задающего устройства с требуемой точностью δгар. Объект регулирования требует номинального вращающего момента Мн, обладает моментом инерции Jн, частотой вращения в номинальном режиме Ωн и ускорением вращения εн. В процессе слежения должна обеспечиваться заданная колебательность М. Точность δгар задана для гармонического входного воздействия.
Исходные данные:
М=1.1;
Jн=33 кг · м2;
Ωн =3.4 рад/с;
εн=1.7 рад/с2;
Мн=28 Н · м;
δгар=56’.
2 ЭНЕРГЕТИЧЕСКИЙ РАСЧЕТ СЛЕДЯЩЕГО ПРИВОДА
Требуемая мощность двигателя может быть определена по заданным параметрам нагрузки по следующей формуле:
![]() ;
(1)
;
(1)
где МН – вращающий момент на валу нагрузки, Н·м;
JН – механический момент инерции нагрузки, кг·м2;
εН – угловое ускорение вращения вала нагрузки, рад/с2;
η – коэффициент полезного действия редуктора;
ΩН – угловая скорость вращения вала нагрузки, рад/с.
Примем коэффициент полезного действия редуктора равным 1. Тогда получим значение требуемой мощности двигателя:
![]() (Вт).
(Вт).
По значению требуемой мощности из каталога выбираем двигатель постоянного тока МИ-32, номинальная мощность которого Рном = 760 Вт, то есть Рном>Ртреб. Двигатель МИ-32 имеет следующие паспортные характеристики:
Рном = 760 Вт;
n = 2500 об/мин;
Uном = 110 В;
Iя = 8.2 А;
Rя = 0.237 Ом;
Мном = 2.96 Н·м;
Jд =
![]() кг·м2.
кг·м2.
Вычислим оптимальное передаточное отношение редуктора по формуле:
![]() . (2)
. (2)
![]() .
.
Угловая скорость вращения, приведенная к валу двигателя, или требуемая угловая скорость, определяется по формуле:
![]() .
(3)
.
(3)
![]() (рад/с).
(рад/с).
По номинальной частоте вращения, приведенной в паспортных данных, найдем номинальную угловую скорость вращения вала двигателя:
![]() .
(4)
.
(4)
![]() (рад/с).
(рад/с).
В результате получили: ωном>ωпр, то есть выбранный двигатель по угловой скорости вращения подходит.
Момент, развиваемый двигателем, определим из основного уравнения электропривода:
![]() .
(5)
.
(5)
![]() (Н·м).
(Н·м).
Получили: Мтр>Мном, поэтому выполним проверку условия:
![]() (Н·м)
(6)
(Н·м)
(6)
В результате получили, что двигатель по моменту подходит, так как 0.94<2.
3 СТАТИЧЕСКИЙ РАСЧЕТ
При слежении по углу двигатель описывается передаточной функцией вида:
![]() ; (7)
; (7)
где kдв – передаточный
коэффициент двигателя
![]() ;
;
ТМ – механическая постоянная двигателя, с.
Передаточный коэффициент двигателя определим из формулы:
![]() ; (8)
; (8)
где Се – конструктивный коэффициент машины по ЭДС, В·*с.
Конструктивный коэффициент по ЭДС можно найти по паспортным данным, используя следующую формулу:
![]() . (9)
. (9)
![]() (
(![]() ).
).
Найдем передаточный коэффициент двигателя по формуле (8):
![]() (
(![]() ).
).
Механическая постоянная двигателя определяется следующей зависимостью:
![]() ; (10)
; (10)
Где Jпр – приведенный
момент инерции,
![]() ;
;
СМ – конструктивный коэффициент
машины по моменту,![]() .
.
Приведенный момент инерции найдем из формулы:
![]() . (11)
. (11)
![]() (
(![]() ).
).
Конструктивный коэффициент по моменту определяется отношением вида:
![]() . (12)
. (12)
![]() (
(![]() ).
).
По формуле (10) вычислим значение механической постоянной двигателя:
![]() (с).
(с).
Таким образом, запишем передаточную функцию двигателя:
![]() . (13)
. (13)
По полученной передаточной функции построим ЛАЧХ двигателя (рисунок 1).
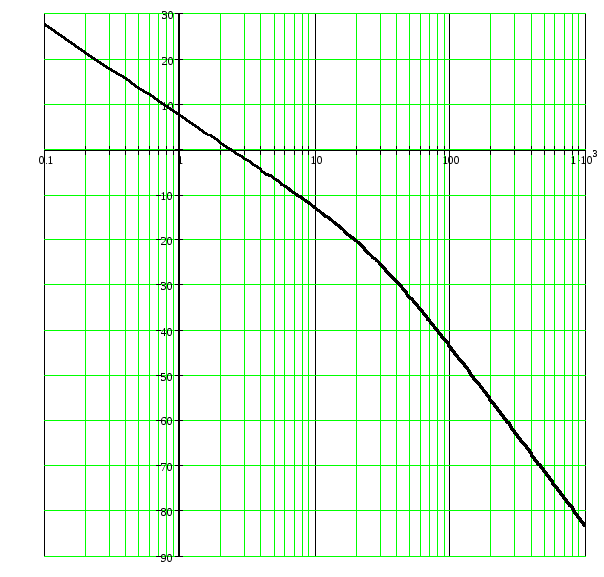
Рисунок 1 – ЛАЧХ двигателя
Выберем измеритель рассогласования.
Заданная точность слежения по углу δгар=56’.
На измеритель рассогласования приходится от 30 до 50% общей ошибки системы. Принимая значение ошибки 50%, получим:
![]() .
.
Переводим в радианы:
![]() (рад)
(рад)
Полученную точность обеспечивают прецизионные потенциометры.
Выберем потенциометр типа ПП со следующими параметрами по справочнику:
![]() =
3200 = 5.58 рад;
=
3200 = 5.58 рад;
Rp= 3150 Ом;
Pp= 5 Вт;
n = 3 витков на 10;
M = 20·10-4 Н·м.
Для обеспечения надежности, выберем коэффициент нагрузки по мощности для потенциометра – kп=0.5. Тогда рассеиваемая мощность потенциометра:
Р=kп·Рр (14)
Р=0,5·5=2,5 (Вт)
Определяем напряжение на потенциометре:
![]() (В). (15)
(В). (15)
Двигатель выбран на 110 В, поэтому выбираем напряжение питание 110 В, а избыток напряжения погасим балластным резистором, который включен в измеритель рассогласования по схеме:
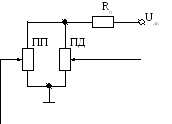
Рисунок 2 – Включение балластного резистора в ИР
Напряжение на Rб:
![]() (В) (16)
(В) (16)
Ток, проходящий через балластный резистор, рассчитывается:
![]() (А) (17)
(А) (17)
Тогда сопротивление балластного резистора будет равно:
![]() (Ом) (18)
(Ом) (18)
Рассчитываем мощность балластного резистора:
![]() (Вт) (19)
(Вт) (19)
Выбираем по справочнику резистор типа ПЭВ, мощностью 2 Вт и сопротивлением 360 Ом.
Вычислим коэффициент преобразования:
![]() (
(![]() ) (20)
) (20)
Найдем к коэффициент передачи прямой цепи:
![]() (21)
(21)
Зная коэффициент передачи прямой цепи
(![]() )
определим коэффициент усиления усилителя:
)
определим коэффициент усиления усилителя:
![]() (22)
(22)
![]() (23)
(23)
На основе выполненных расчетов к усилителю привода предъявляются следующие требования:
kу=655;
Uвых=Uпит.дв.=110 В;
Iвых=Iя=8.2 А;
Pвых= 902 Вт;
Передаточная функция нескорректированного привода примет вид:
![]() (24)
(24)
Найдем положение рабочей точки:
![]() с-1 (25)
с-1 (25)
![]() (26)
(26)
![]() (рад) (27)
(рад) (27)
![]() (дБ) (28)
(дБ) (28)
Координаты рабочей точки
![]()
По полученной передаточной функции построим ЛАЧХ привода (рисунок 3).
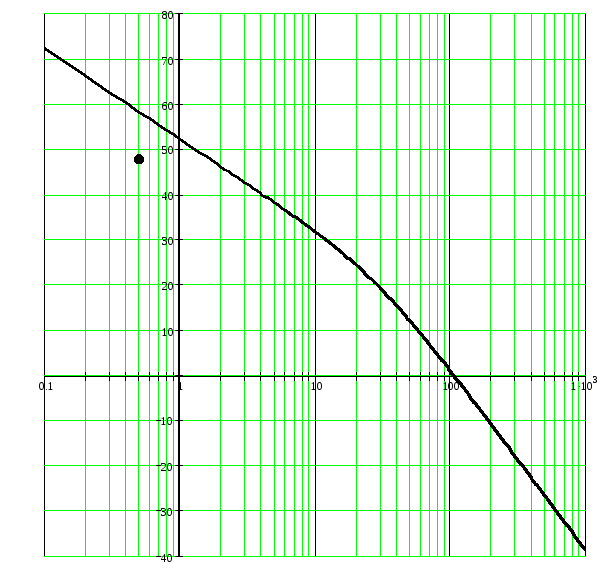
Рисунок 3 – ЛАЧХ привода
4 РАСЧЕТ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
4.1 Синтез последовательного корректирующего устройства по прямым логарифмическим характеристикам
Желаемую ЛАЧХ, определяющую требуемые динамические характеристики, построим по заданному коэффициенту колебательности M = 1.1.
Определим границы среднечастотной асимптоты желаемой ЛАЧХ:
![]() (29)
(29)
![]() (30)
(30)
Для обеспечения требуемой точности, ЛАЧХ нескорректированного привода должна пройти либо через рабочую точку А, либо выше ее (в нашем случае ЛАЧХ двигателя проходит выше рабочей точки).
Проведем ЛАЧХ нескорректированного привода.
Затем, через т.А проведем линию (-40дБ/дек)
до пересечения с
![]() ,
потом проводим линию (-20дБ/дек) до
пересечения с
,
потом проводим линию (-20дБ/дек) до
пересечения с
![]() ,
затем линия продолжается с наклоном
(-40дБ/дек).
,
затем линия продолжается с наклоном
(-40дБ/дек).
Совмещаем ЛАЧХ нескорректированного привода и желаемую. Для этого переносим желаемую ЛАЧХ параллельно самой себе до пересечения высокочастотных асимптот ЛАЧХ нескорректированного привода и желаемой.
Желаемая ЛАЧХ привода и ЛАЧХ последовательного корректирующего устройства приведены на рисунке 4.
По полученной передаточной функции привода с последовательным корректирующим устройством построим ФЧХ привода – рисунок 4.
Из графика запас устойчивости по фазе равен 0.7 рад = 410. Так как ФЧХ не пересекает прямой –π, то запасы устойчивости по амплитуде привода с последовательным корректирующим устройством неограниченны.
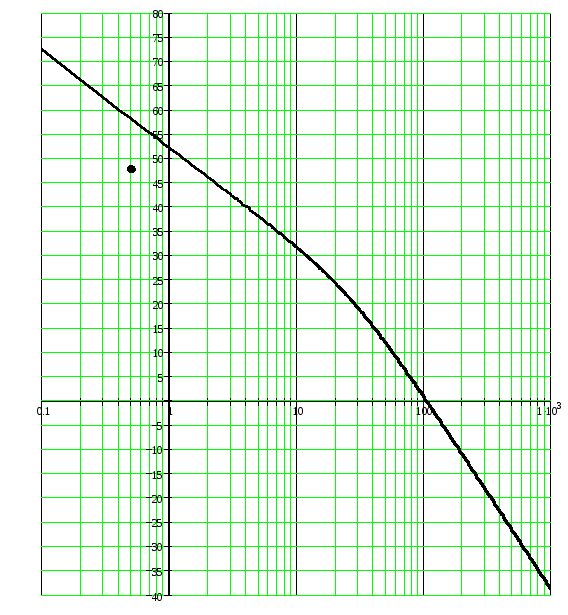














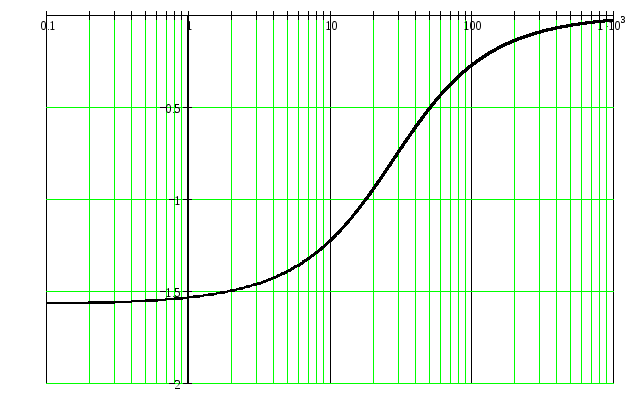

Рисунок 4 – ЛАЧХ, ЖЛАЧХ, ЛАЧХ КУ и ЖФЧХ привода.
Выпишем частоты излома:
![]() (с-1)
(с-1)
![]() (с-1)
(с-1)
![]() (с-1)
(с-1)
![]() (с-1)
(с-1)
По графику запишем функцию ЛАЧХ корректирующего звена :
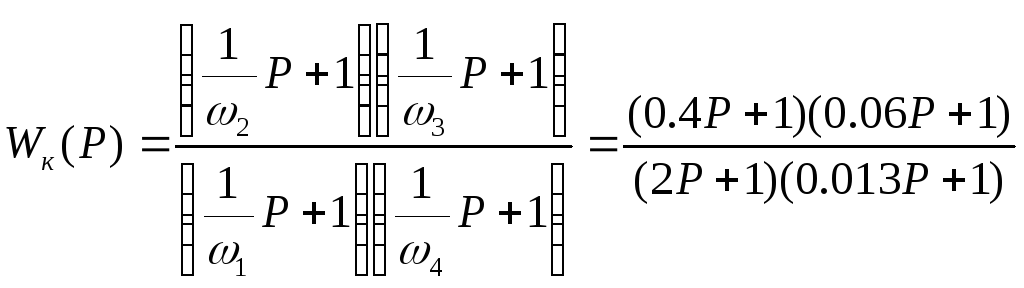 (31)
(31)
Тогда передаточная функция привода примет вид:
![]() (32)
(32)
Используя атлас Топчеева по виду передаточной функции находим корректирующее звено:

Рисунок 5 – Последовательное корректирующее звено
Рассчитаем параметры корректирующего звена:
Пусть R1=1000 (Ом);
![]() мкФ (33)
мкФ (33)
![]() (34)
(34)
![]() (35)
(35)
Корректирующее устройство, для лучшей работы системы, желательно поставить между каскадами усилителя, но мы поставим его после измерителя рассогласования. Тогда структурная схема привода привет вид:
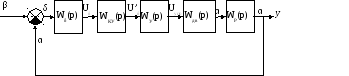
Рисунок 6 – Полная структурная схема привода с последовательной коррекцией
Вычисляем коэффициент усиления сдвинутой ЛАЧХ:
![]()
Построим переходный процесс в системе и определим основные показатели качества.
Передаточная функция ИР имеет вид:
![]()
Передаточная функция корректирующего устройства имеет вид:
![]()
Передаточная функция усилителя имеет вид:
![]()
Передаточная функция двигателя имеет вид:
![]()
Передаточная функция редуктора имеет вид:
![]()
Передаточная функция замкнутой системы имеет вид:
![]()
Преобразование данной передаточной функции в программе MathCAD:
![]()
Построение переходного процесса САУ регулирования громкостью звука выполняется на основе обратное преобразования Лапласа от передаточной функции системы автоматического регулирования в замкнутой форме. Преобразование по Лапласу от передаточной функции системы автоматического регулирования в замкнутой форме осуществляется в программе MathCAD:

П
h(t)
t, c
hуст
tmax
tр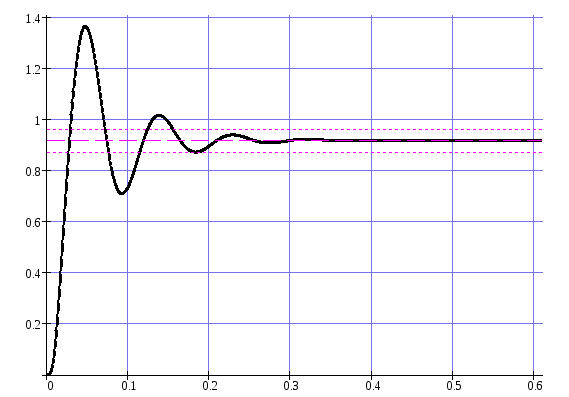


Рисунок 6а - График переходного процесса системы
По графику рисунка 6а, определим показатели качества системы автоматического управления:
- установившееся значение выходной величины:
![]()
- перерегулирование, %:
![]()
- колебательность системы, то есть число колебаний регулируемой величины за время переходного процесса:
![]()
- время нарастания (время, за которое регулируемая величина достигает установившегося значения), с:
![]()
- время достижения максимального значения, с:
![]()
- время регулирования, с:
![]()
Косвенные оценки качества, осуществляются по графику амплитудно-частотной характеристики исходной системы. Амплитудно-частотная характеристика исходной системы автоматического регулирования представлена в соответствии с рисунком 7а.
A(ω)
ω, Гц
ωp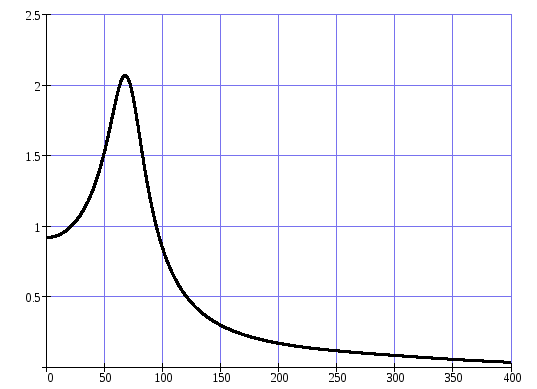

Рисунок 7а - АЧХ исходной системы автоматического регулирования
По графику рисунка 7а определяем максимальное отклонение входного сигнала равное Амах(ω) = 2.05, А(0) = 0,92.
Колебательность системы определяется по формуле:
![]() (72)
(72)
Резонансная частота – частота, в которой АЧХ достигает своего максимального значения. Максимальное значение АЧХ величины будет Аmax. Этому значению соответствует частота, которая равна:
![]() Гц.
Гц.
Вывод: система является устойчивой, так как из анализа графика переходного процесса система имеет установившееся состояние hуст(t) = 0,92