

Оглавление
1 ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2
2 ЭНЕРГЕТИЧЕСКИЙ РАСЧЕТ СЛЕДЯЩЕГО ПРИВОДА 3
3 СТАТИЧЕСКИЙ РАСЧЕТ 5
13
Рисунок 5 – Структурная схема нескорректированного привода 13
4 РАСЧЕТ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК 14
4.1 Синтез последовательного корректирующего устройства по прямым логарифмическим характеристикам 14
17
4.2 Синтез встречно-параллельного корректирующего устройства по обратным логарифмическим характеристикам 18
Список литературы 23
1 Техническое задание
Необходимо выполнить расчет следящего привода с выполнением слежения по углу поворота с заданной гарантированной точностью δгар для нагрузки, которая обладает механическим моментом инерции Jн. привод должен обеспечить номинальную угловую скорость вращения вала нагрузки Ωн и угловое ускорение Ен. Для управления нагрузка требует вращающего момента Мн. В процессе управления следящий привод должен обеспечить регулирование с заданным показателем колебательности М.
Исходные данные:
М=1.3;
Jн=31
![]() ;
;
Ωн =3.2 рад/с;
εн=1.9 рад/с2;
Мн=26
![]() ;
;
δгар=47’.
2 Энергетический расчет следящего привода
Требуемая мощность двигателя может быть определена по заданным параметрам нагрузки по следующей формуле:
![]() ; (1)
; (1)
где МН – вращающий момент на валу нагрузки, Н*м;
JН – механический момент инерции нагрузки, кг*м2;
εН – угловое ускорение вращения вала нагрузки, рад/с2;
η – коэффициент полезного действия редуктора;
ΩН – угловая скорость вращения вала нагрузки, рад/с.
Примем коэффициент полезного действия редуктора равным 0.9, тогда получим значение требуемой мощности двигателя:
![]() (Вт).
(Вт).
По значению требуемой мощности из каталога выбираем двигатель постоянного тока МИ-32, номинальная мощность которого Рном = 760 Вт, то есть Рном>Ртреб. Двигатель МИ-32 имеет следующие паспортные характеристики:
Рном = 760 Вт;
n = 2500 об/мин;
Uном = 110 В;
Iя = 8.2 А;
Rя = 0.237 Ом;
Мном
= 2.96
![]() ;
;
Jд
=
![]()
![]() .
.
Вычислим оптимальное передаточное отношение редуктора по формуле:
![]() . (2)
. (2)
![]() .
.
Угловая скорость вращения, приведенная к валу двигателя, или требуемая угловая скорость, определяется по формуле:
![]() . (3)
. (3)
![]() (рад/с).
(рад/с).
По номинальной частоте вращения, приведенной в паспортных данных, найдем номинальную угловую скорость вращения вала двигателя:
![]() . (4)
. (4)
![]() (рад/с).
(рад/с).
В результате получили: ωном>ωпр, то есть выбранный двигатель по угловой скорости вращения подходит.
Момент, развиваемый двигателем, определим из основного уравнения электропривода:
![]() . (5)
. (5)
![]() (
(![]() ).
).
Получили: Мтр<Мном, поэтому выполним проверку условия:
![]() (
(![]() ) (6)
) (6)
В результате получили, что двигатель по моменту подходит, так как 0.966<2.
3 Статический расчет
При слежении по углу двигатель описывается передаточной функцией вида:
![]() ; (7)
; (7)
где kдв
– передаточный коэффициент двигателя
![]() ;
;
ТМ – механическая постоянная двигателя, с.
Передаточный коэффициент двигателя определим из формулы:
![]() ; (8)
; (8)
где Се – конструктивный коэффициент машины по ЭДС, В*с.
Конструктивный коэффициент по ЭДС можно найти по паспортным данным, используя следующую формулу:
![]() . (9)
. (9)
![]() (
(![]() ).
).
Найдем передаточный коэффициент двигателя по формуле (8):
![]() (
(![]() ).
).
Механическая постоянная двигателя определяется следующей зависимостью:
![]() ; (10)
; (10)
где Jпр
– приведенный момент инерции,
![]() ;
;
СМ
– конструктивный коэффициент машины
по моменту,![]() .
.
Приведенный момент инерции найдем из формулы:
![]() . (11)
. (11)
![]() (
(![]() ).
).
Конструктивный коэффициент по моменту определяется отношением вида:
![]() . (12)
. (12)
![]() (
(![]() ).
).
По формуле (10) вычислим значение механической постоянной двигателя:
![]() (с).
(с).
Таким образом, запишем передаточную функцию двигателя:
![]() . (13)
. (13)
Перепишем передаточную функцию по другому:
![]()
μ–статический коэффициент передачи прямой цепи следящего привода.
![]()
Зная
что
![]() и
и![]() то коэффициент передачи прямой цепи
найдем из следующего выражения:
то коэффициент передачи прямой цепи
найдем из следующего выражения:
![]() (16)
(16)
Зная коэффициент передачи прямой цепи определим коэффициент усиления усилителя:
![]() (17)
(17)
Тогда передаточная функция примет вид:
![]()
Найдем
положение рабочей точки:
![]()
![]() (28)
(28)
![]() (29)
(29)
![]() (30)
(30)
![]() (31)
(31)
![]()
lg(ωC)=1.44 дек
20lg(μ)=20lg(246)=47.818
Для обеспечения требуемой точности, ЛАЧХ нескорректированного привода должна пройти либо через рабочую точку А, либо выше ее.
Рисунок 1 – ЛАЧХ двигателя
Выберем измеритель рассогласования.
Заданная точность слежения по углу δгар=55’. Для заданной точности в качестве измерителя рассогласования допустимо выбрать потенциометр. Выберем потенциометр типа ПП со следующими параметрами по справочнику:
![]() =
3200 =
5.58 рад;
=
3200 =
5.58 рад;
Rp= 4 Ом;
Pp= 5 Вт;
n = 3 витков на 10;
M
=
20
![]() .
.
Выберем коэффициент нагрузки по мощности для потенциометра – 0.5. Тогда рассеиваемая мощность резистора 2.5 Вт (Pp= 5 Вт).
![]() (В).
(14)
(В).
(14)
![]() (
(![]() ) (15)
) (15)
Так
как
![]() и
и![]() то коэффициент передачи прямой цепи
найдем из следующего выражения:
то коэффициент передачи прямой цепи
найдем из следующего выражения:
![]() (16)
(16)
Зная
коэффициент передачи прямой цепи (![]() )
определим коэффициент усиления усилителя:
)
определим коэффициент усиления усилителя:
![]() (17)
(17)
![]() (18)
(18)
Тогда передаточная функция нескорректированного привода примет вид:
![]() (19)
(19)
По полученной передаточной функции построим ЛАЧХ привода (рисунок 2).
Рисунок 2 – ЛАЧХ привода
На основе выполненных расчетов к усилителю привода предъявляются следующие требования:
kу= 60;
Uвых= 60 В;
Iвых= 5.5 А;
Pвых= 330 Вт;
Схема усилителя изображена на рисунке 3.
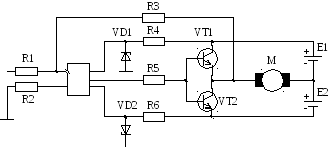
Рисунок 3 – Принципиальная схема усилителя
Выберем источник питания:
![]() (В). (20)
(В). (20)
Тогда
![]() (В). (21)
(В). (21)
Для обеспечения надежности выберем коэффициент нагрузки по напряжению kН = 0.8, тогда
![]() (В). (22)
(В). (22)
Выберем ток коллектора Iк = Iя = 5.5 А, с учетом перегрузки:
![]() (А). (23)
(А). (23)
По найденному Uкэ по справочнику выбираем транзистор КТ-835:
Iкм= 15 А;
Uкэ.max= 400 В;
Pкmax= 100 Вт;
Нагрузочная прямая изображена на рисунке 4.
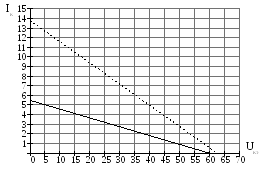
Рисунок 4 – Нагрузочная прямая
h21 = 500
Вычислим ток базы (выходной ток ОУ):
![]() (А). (24)
(А). (24)
Так как выходной ток усилителя напряжения составляет 28 мА, выберем операционный усилитель К157УД2. Для него UmaxОУ = 11В. Тогда:
![]() (Ом). (25)
(Ом). (25)
![]() (26)
(26)
Выберем R1 = 1 кОм, тогда R3 = 60 кОм.
Выберем стабилитроны VD1 и VD2 с напряжением стабилизации 15 В (КС515).
Сопротивление балансного резистора (R4,R6):
![]() кОм (27)
кОм (27)
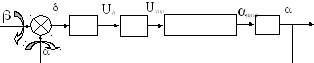
Рисунок 5 – Структурная схема нескорректированного привода