

лабораторная работа / Определение параметров ДПТ на моделях
.docСАРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО – СТРОИТЕЛЬНЫЙ
КАФЕДРА «УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Лабораторная работа №2
по дисциплине:
Электромеханические системы
Определение параметров ДПТ на моделях
Выполнил ст. гр. УИТ-52
Телегин Е.Г.____________
Принял преподаватель
Николаенко Ю.В._________
«____» ____________ 2008г.
Балаково 2008
Цель работы:
С использованием виртуальных моделей, реализованных в пакете MatLab определить параметры двигателя постоянного тока.
Ход работы:
Исходные данные. Исследуется ДПТ марки МИ-11 со следующими характеристиками: мощность на валу Рном, 0,12кВт; частота вращения nном, 3000 об/мин; напряжение питания Uном, 60В; ток якоря IЯ, 2,27 А; сопротивление обмотки якоря RЯ, 0,94 Ом; момент номинальный Мном, 0,49 Н·м; момент инерции Jд·104, 15,3 кг·м2 .
1. Рассчитаем передаточную функцию двигателя постоянного тока, приняв за выходную величину угловую скорость ω
![]()
На основании паспортных данных коэффициенты ЭДС kЕ и момента kМ рассчитываются по формулам, исходя из номинальных параметров двигателя:
![]()
![]()
![]()
Соответственно электромагнитная ТЭ и механическая ТМ постоянная времени:
![]()
![]()
Тогда передаточная функция
![]()
Чтобы методика определения коэффициентов двигателя приближалась к эксперименту в производственных условиях, зададим исследуемый объект в виде подсистемы («черного ящика») (рис.1).

Рис.1. Подсистема двигателя с рассчитанной передаточной функцией
Таким образом, будем считать, что исследуемый объект при виртуальном эксперименте задан рассчитанной передаточной функцией.
2. Определим коэффициент усиления двигателя в приращениях, используя схему, представленную на рис.2.
Входным сигналом Step выводим звено на рабочую точку, а затем в установившемся режиме задаем входному сигналу приращение Step1. Согласно осциллограммам рис.3 рассчитаем коэффициент усиления:
![]() .
.

Рис.2. Схема устройства для определения параметров ДПТ

Рис.3. Осциллограммы входного и выходного сигналов
Для более точного определения искомых значений воспользуемся кнопкой Zoom в окне Scope (рис.4).

Рис.4. Увеличенная осциллограмма
3. Определим механическую постоянную времени двигателя, используя для этого виртуальную модель (рис.5). То есть эта модель, позволяющая определить коэффициент дифференциального уравнения при первой производной при известном коэффициенте усиления. С помощью интегратора определяется площадь, а блок Divide осуществляет деление выходного сигнала интегратора на коэффициент усиления. На вход двигателя подается постоянное напряжение 60 В. Коэффициент усиления Gain равен коэффициенту передачи двигателя, а произведение входного напряжения на коэффициент передачи двигателя определяет обороты в установившемся режиме, которое подается на сумматор и в блок Divide.

Рис.5а. Виртуальная модель для определения механической постоянной времени с подсистемой в виде передаточной функцией
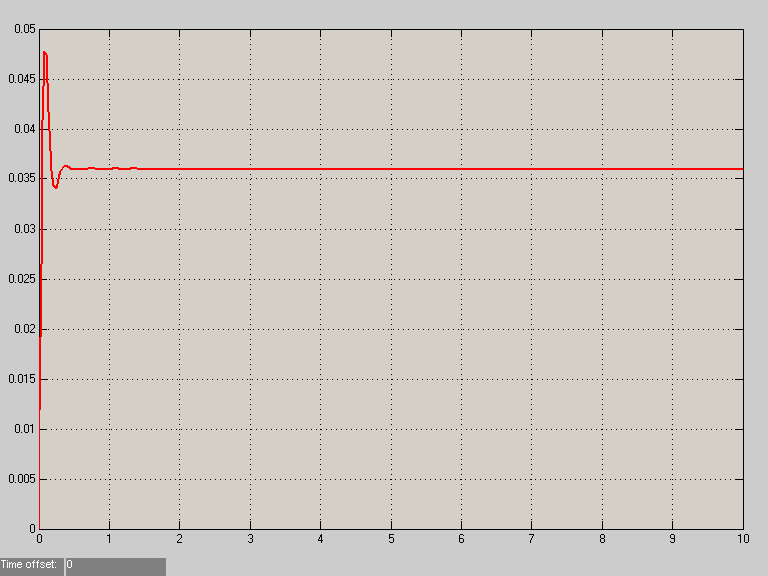
Рис 5б. Осциллограмма механической постоянной времени
Определим механическую постоянную времени в случае, когда двигатель задан структурной схемой рис.6.

Рис.6. Структурная схема двигателя постоянного тока
Виртуальное устройство для измерения постоянной времени аналогично рис.5 и задавая Subsystem2 структурной схемой (рис.6) получим результат, представленный на рис.7. Как видно, значения механической постоянной времени практически идентичны.

Рис.7а. Виртуальная модель для определения механической постоянной времени с подсистемой в виде структурной схемы
4. Исследуем электромагнитную постоянную времени на вращающемся двигателе с использованием формулы (19). Виртуальная модель при этом имеет вид, представленный на рис.8.

Рис.8. Виртуальная модель для определения электромагнитной постоянной времени на вращающемся двигателе
Подсистемой Subsystem задан двигатель в виде структурной схемой (рис.9), где в качестве выходных сигналов используется текущее значение тока I и ЭДС Е.
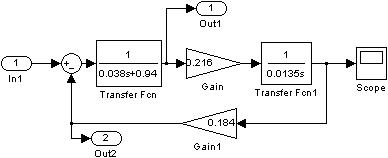
Рис.9. Подсистема Subsystem
Осциллограф Scope помогает осуществить выбор начального и конечного значения тока. В данном случае интегратор включается при достижении текущим током 10 А, а выключается – при 50 А (рис 10). Диапазон выбран при нарастании токового сигнала. Разность токов -40 отражена блоком Constant3. Настройка блока Constant4 определяет сопротивление якорной цепи. Полученная с помощью виртуальной модели электромагнитная постоянная времени совпадает с рассчитанной на основании паспортных данных.

Рис 10. Осциллограмма тока

Рис 11. Осциллограмма ЭДС
Вывод:
В ходе выполнения данной работы были построены модели для определения механической и электромагнитной постоянных времени, кроме того, данные полученные с помощь виртуальных моделей совпадают расчетными значениями механической и электромагнитной постоянных времени.