

лабораторная работа / лаба 2
.doc
Кафедра автоматики и управления в технических системах
ОТЧЕТ
по лабораторной работе №2 по дисциплине
«Электромеханические системы»
Исследование двухмассовой электромеханической системы с электроприводом постоянного тока.
Москва 2010
Задание
по лабораторной работе №2.
Для двигателя постоянного тока независимого возбуждения
с якорным управлением по схеме тиристорный преобразователь - двигатель, соединённого с исполнительным механизмом через редуктор и упругое звено, и имеющих параметры:
Номинальная мощность, кВт 1,0
Номинальное напряжение, В 210
Номинальная скорость вращения, об/мин 2800
Номинальный ток, А 5,85
Момент инерции якоря,кг.м2 0.3
Скорость вращения вала
исполнительного механизма, об/мин 240
Момент инерции исполнительного механизма, кг.м2 30
Сопротивление якорной цепи, Ом 0,25
Жёсткость выходного (медленного) вала редуктора, Нм/рад 15000 постоянная времени тиристорного преобразователя, с 0. 03
коэффициент усиления тиристорного преобразователя 20
сопротивление якорной цепи тиристорного преобразователя и индуктивность якорной цепи тиристорного преобразователя принять равными тем же значениям параметров якорной цепи двигателя.
1.Составить исходную расчётную схему электромеханической системы (момент нагрузки приложен к валу исполнительного механизма).
2.Составить расчётную схему электромеханической системы с приведенными параметрами (момент нагрузки приложен к валу исполнительного механизма).
3.Составить уравнения для динамического режима работы системы (в общем виде и с числовыми коэффициентами),
4.Выполнить моделирование динамических процессов при номинальном напряжении якоря и моменте нагрузки, равном номинальному моменту двигателя (приведенном к валу двигателя).
4.1.Составить структурную схему решения.
4.2.Построить переходные характеристики для ЭДС тиристорного
преобразователя, тока, скорости двигателя, деформации валопровода
4.3.Указать на графиках динамических процессов установившиеся
значения переменных, полученные в результате моделирования.
и сравнить их с расчётными значениями.
5. Выполнить исследование электромеханической системы с использованием пакета Control system toolbox. Математическое описание системы выполнить в подклассе ss. Определить частоты колебаний и степень демпфирования (оператор damp), получить кривые переходных процессов (оператор step) для следующих вариантов:
5.1.В системе тиристорный преобразователь - двигатель(Т - Д),
отсоединённой от исполнительного механизма.
5.2.В механизме, отсоединённом от электропривода.
5.3.В полной двухмассовой электромеханической системе.
5.4.Сравнить полученные значения частот.
6.Привести исходную структурную схему системы с передаточными
функциями (с числовыми значениями параметров системы).
Выполнение.
1. Расчётная схема двухмассовой электромеханической системы (момент нагрузки приложен к валу исполнительного механизма) представлена на рисунке 1.

Рис.1
Составим уравнения, описывающие механическую часть этой системы. Эти уравнения будем составлять в виде уравнений Лагранжа второго род. За обобщённые координаты примем угол поворота вала двигателя двиг и исполнительного механизма мех. Запишем выражение для кинетической энергии данной системы:
 (1)
(1)
В этом выражении Jдвиг Jмех – моменты инерции якоря двигателя и исполнительного механизма соответственно.
Вычислим производные от этой энергии:
 (2)
(2)
Запишем выражения для потенциальной
энергии системы. Как известно, потенциальная
энергия деформации
![]() ,
где
,
где
k – физическая жёсткость
медленного вала,
![]() ,
,
![]() -
действительная крутильная деформация
упругого вала,
-
действительная крутильная деформация
упругого вала,
![]() .
.
Итак, для системы:
![]() (3)
(3)
Вычислим производные от этой энергии:
![]() (4)
(4)
![]() - жесткость валопровода, приведённая к
валу двигателя.
- жесткость валопровода, приведённая к
валу двигателя.
![]() - угол деформации валопровода, приведённый
к валу двигателя.
- угол деформации валопровода, приведённый
к валу двигателя.
![]() (5)
(5)
Работа обобщённой неконсервативной силы:
 (6)
(6)
Итак, уравнения для механической части системы:
 (7)
(7)
2. На основе системы уравнений 7 составляем расчётную схему с приведёнными параметрами:

Рис.2
 (8)
(8)
![]() - не приведённый момент инерции механизма.
- не приведённый момент инерции механизма.
3. Составим уравнения, описывающие данную электромеханическую систему. Для этого добавим к системе 7 уравнения, описывающие электрическую часть этой системы:
 (9)
(9)
В этих уравнениях:
TТП – постоянная времени тиристорного преобразователя, [с];
ТП – Э.Д.С. тиристорного преобразователя, [В];
KТП – коэффициент усиления тиристорного преобразователя;
I – ток якоря двигателя, [А];
R=RТП+Rдвиг – суммарное сопротивление тиристорного преобразователя и якоря двигателя, [Ом];
L=LТП+Lдвиг - суммарная индуктивность тиристорного преобразователя и якоря двигателя, [Гн];
Се – электрическая постоянная двигателя,
![]() ;
;
двиг – угол поворота вала
двигателя,
![]() ;
;
мех – угол поворота исполнительного
механизма,
![]() ;
;
СМ –механическая постоянная
двигателя,
![]() ;
;
- передаточное число редуктора;
Mc –
приведённый момент сопротивления
вращению двигателя,
![]() ;
;
![]() - момент инерции якоря
двигателя,
- момент инерции якоря
двигателя,
![]()
![]() - приведённый момент инерции механизма,
- приведённый момент инерции механизма,
![]() ;
;
- действительная крутильная деформация валопровода, [рад];
![]() - жесткость валопровода, приведённая к
валу двигателя,
- жесткость валопровода, приведённая к
валу двигателя,
![]() .
.
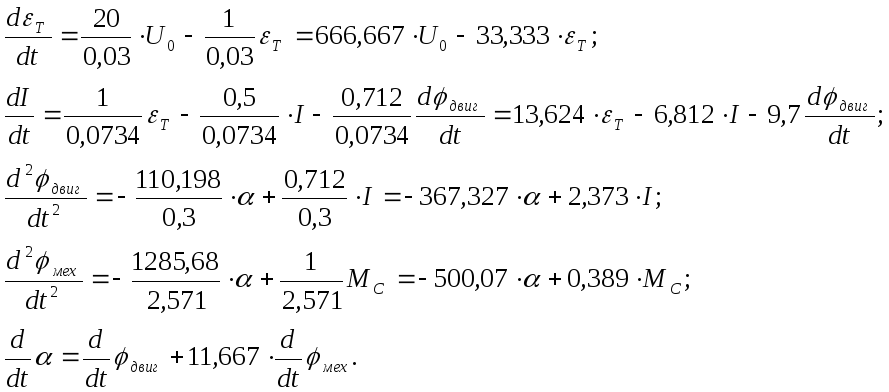
Запишем эти уравнения применительно к нашему двигателю:
 (10)
(10)
![]()
 (11)
(11)
![]() 4.
Выполним моделирование динамических
процессов в системе. Для этого приведём
систему уравнений 11 к следующему виду:
4.
Выполним моделирование динамических
процессов в системе. Для этого приведём
систему уравнений 11 к следующему виду:
![]()
 (12)
(12)
![]() Вычислим
величины входных воздействий:
Вычислим
величины входных воздействий:
![]()
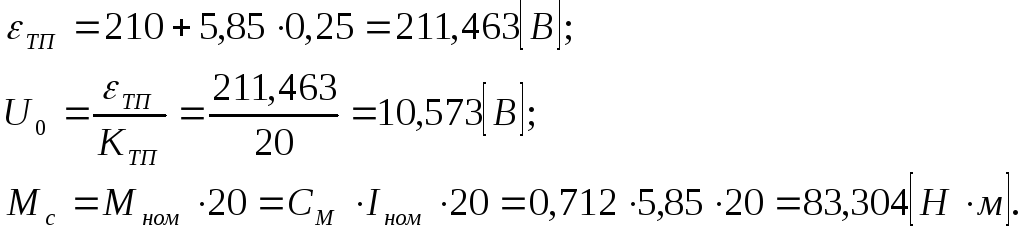 (13)
(13)
![]() Схема
решения системы 12 в Simulink
для заданных входных воздействий имеет
вид:
Схема
решения системы 12 в Simulink
для заданных входных воздействий имеет
вид:
![]()

![]() Рис.3
Рис.3
![]() В
результате моделирования получены
следующие графики переходных процессов:
В
результате моделирования получены
следующие графики переходных процессов:
![]()

![]() Рис.4
Э.Д.С. тиристорного преобразователя
Рис.4
Э.Д.С. тиристорного преобразователя
![]()

![]() Рис.5
Ток якоря двигателя
Рис.5
Ток якоря двигателя
![]()

![]() Рис.6
Скорость вращения двигателя
Рис.6
Скорость вращения двигателя
![]()

![]() Рис.7
Скорость вращения исполнительного
механизма
Рис.7
Скорость вращения исполнительного
механизма
![]()

![]() Рис.8
Деформация валопровода.
Рис.8
Деформация валопровода.
5. Выполнить исследование электромеханической системы с использованием пакета Control System Toolbox.
Для этого воспользуемся приложением MATLAB Control System toolbox. Это приложение работает с системой, заданной в пространстве своих координат состояния:
![]()
![]()
![]() где
X - вектор координат
состояния системы, U-вектор
управления, Y – вектор
выхода, A – матрица
состояния системы, B –
матрица управления системы, C
– матрица наблюдения, D
–промежуточная матрица.
где
X - вектор координат
состояния системы, U-вектор
управления, Y – вектор
выхода, A – матрица
состояния системы, B –
матрица управления системы, C
– матрица наблюдения, D
–промежуточная матрица.
5.1. Выполним моделирование переходных процессов в системе тиристорный преобразователь – двигатель (Т-Д), отсоединённой от исполнительного механизма.
Это система описывается следующей системой уравнений:
 (14)
(14)
В этих уравнениях:
TТП – постоянная времени тиристорного преобразователя, [с];
ТП – Э.Д.С. тиристорного преобразователя, [В];
KТП – коэффициент усиления тиристорного преобразователя;
I – ток якоря двигателя, [А];
R=RТП+Rдвиг – суммарное сопротивление тиристорного преобразователя и якоря двигателя, [Ом];
L=LТП+Lдвиг - суммарная индуктивность тиристорного преобразователя и якоря двигателя, [Гн];
Се – электрическая постоянная двигателя,
![]() ;
;
двиг – угол поворота вала
двигателя,
![]() ;
;
СМ –механическая постоянная
двигателя,
![]() ;
;
![]() - момент инерции якоря двигателя,
- момент инерции якоря двигателя,
![]()
В числовой форме:
 (15)
(15)
Введём в этой системе координаты состояния:
 (16)
(16)
Тогда система уравнений в пространстве своих координат состояния запишется следующим образом:
 (17)
(17)
Обозначив в 17 U0=U1 и, учтя масштабирующие коэффициенты входных воздействий, запишем матрицы нашей системы:
 (18)
(18)
Напишем в MATLAB программу для моделирования переходных процессов в данной системе.
Вводим матрицы нашей системы:
>> A=[-33.333 0 0; 13.624 -6.812 -9.700; 0 2.373 0]
A =
-33.3330 0 0
13.6240 -6.8120 -9.7000
0 2.3730 0
>> B=[7244 ; 0 ; 0]
B =
7244
0
0
>> C=[1 0 0; 0 1 0; 0 0 1]
C =
1 0 0
0 1 0
0 0 1
>> D=0
D =
0
Формируем нашу систему в пространстве своих координат состояния:
>> sys12=ss(A, B, C,D)
a =
x1 x2 x3
x1 -33.33 0 0
x2 13.62 -6.812 -9.7
x3 0 2.373 0
b =
u1
x1 7244
x2 0
x3 0
c =
x1 x2 x3
y1 1 0 0
y2 0 1 0
y3 0 0 1
d =
u1
y1 0
y2 0
y3 0
Определяем собственные числа системы, частоты собственных колебаний и степень демпфирования:
>> damp(sys12)
|
Eigenvalue (собственные числа) |
Damping (степень демпфирования) |
Freq. (rad/s) (собственные частоты колебаний) |
|
3.41e+000 + 3.38e+000i -3.41e+000 - 3.38e+000i - ---3.33e+001 |
7,10e-001 7,10e-001 1.00e+000
|
4,80e+000 4,80+000 3,33e+000
|
>> damp(sys12)
Полученные графики имеют вид:

5.2 Выполним моделирование переходных процессов в механизме, отсоединённом от электропривода. Этот механизм описывается следующей системой уравнений:
 (19)
(19)
В этих уравнениях:
двиг – угол поворота вала
двигателя,
![]() ;
;
мех – угол поворота исполнительного
механизма,
![]() ;
;
- передаточное число редуктора;
Мдвиг – момент, создаваемый
двигателем,
![]() ,
,
Mc –
приведённый момент сопротивления
вращению двигателя,
![]() ;
;
![]() - момент инерции якоря двигателя,
- момент инерции якоря двигателя,
![]()
![]() - приведённый момент инерции механизма,
- приведённый момент инерции механизма,
![]() ;
;
- действительная крутильная деформация валопровода, [рад];
![]() - жесткость валопровода, приведённая к
валу двигателя,
- жесткость валопровода, приведённая к
валу двигателя,
![]() .
.
Запишем эти уравнения применительно к нашему двигателю:
![]()
 (20)
(20)
Введем в системе 19 координаты состояния:
 (21)
(21)
Тогда в пространстве своих координат состояния система запишется следующим образом:
 (22)
(22)
Обозначив в 22 Mдвиг =U1; Mc=U2 и, учтя масштабирующие коэффициенты входных воздействий, запишем матрицы нашей системы:
 (23)
(23)
Запишем программу для моделирования данной системы в MATLAB.
Вводим матрицы нашей системы:
A =
0 0 -367.3270
0 0 499.8000
1.0000 -11.6670 0
>> B=[13.884 0; 0 18.903; 0 0]
B =
13.8840 0
0 18.9030
0 0
>> C=[ 0 0 1]
C =
0 0 1
>> D=0
D =
0
Формируем нашу систему в пространстве своих координат состояния:
>> sys11=ss(A, B,C,D)
a =
x1 x2 x3
x1 0 0 -367.3
x2 0 0 499.8
x3 1 -11.67 0
b =
u1 u2
x1 13.88 0
x2 0 18.9
x3 0 0
c =
x1 x2 x3
y1 0 0 1
d =
u1 u2
y1 0 0
Определяем собственные числа системы, частоты собственных колебаний и степень демпфирования:
>> damp(sys11)
|
Eigenvalue (собственные числа) |
Damping (степень демпфирования) |
Freq. (rad/s) (собственные частоты колебаний) |
|
0.00e+000 0.00e+000 + 7.87e+001i 0.00e+000 - 7.87e+001i |
-1.00e+00 -6.12e-017 -6.12e-017 |
0.00e+000 7.87e+001 7.87e+001 |
Строим переходный процесс в данной системе:
step(sys11)

Рис.12 Деформация валопровода
5.3. Выполняем моделирование двухмассовой системы в целом.
Для этого введём в системе 12 следующие координаты состояния:
 (24)
(24)
Тогда система 12 запишется следующим образом:
 (25)
(25)
Обозначив в 25 U0=U1; Mc=U2 и, учтя масштабирующие коэффициенты входных воздействий, запишем матрицы нашей системы:

Запишем программу для моделирования данной системы в MATLAB.
Вводим матрицы нашей системы
>> A=[ -33.333 0 0 0 0; 16.624 -6.812 -9.7 0 0; 0 2.373 0 0 -367.327; 0 0 0 0 42.85; 0 0 1 -11.667 0]
A =
-33.3330 0 0 0 0
16.6240 -6.8120 -9.7000 0 0
0 2.3730 0 0 -367.3270
0 0 0 0 42.8500
0 0 1.0000 -11.6670 0
>> B=[ 7244 0; 0 0; 0 0; 0 18.903; 0 0]
B =
1.0e+003 *
7.2440 0
0 0
0 0
0 0.0189
0 0
>> C=[1 0 0 0 0; 0 1 0 0 0; 0 0 1 0 0; 0 0 0 1 0; 0 0 0 0 1]
C =
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1
>> D=0
D =
0
Формируем нашу систему в пространстве своих координат состояния:
>> sys10=ss(A,B,C,D)
a =
x1 x2 x3 x4 x5
x1 -33.33 0 0 0 0
x2 16.62 -6.812 -9.7 0 0
x3 0 2.373 0 0 -367.3
x4 0 0 0 0 42.85
x5 0 0 1 -11.67 0
b =
u1 u2
x1 7244 0
x2 0 0
x3 0 0
x4 0 18.9
x5 0 0
c =
x1 x2 x3 x4 x5
y1 1 0 0 0 0
y2 0 1 0 0 0
y3 0 0 1 0 0
y4 0 0 0 1 0
y5 0 0 0 0 1
d =
u1 u2
y1 0 0
y2 0 0
y3 0 0
y4 0 0
y5 0 0
Определяем собственные числа системы, частоты собственных колебаний и степень демпфирования:
>> damp(sys10)
|
Eigenvalue (собственные числа) |
Damping (степень демпфирования) |
Freq. (rad/s) (собственные частоты колебаний) |
|
-3.37e+000 + 1.33e+000i -3.37e+000 - 1.33e+000i -3.70e-002 + 2.96e+001i -3.70e-002 - 2.96e+001i -3.33e+001
|
9.30e-001 9.30e-001 1.25e-003 1.25e-003 1.00e+000 |
3.62e+000 3.62e+000 2.96e+001 2.96e+001 3.33e+001 |
Командой >> step(sys10, 0:0.01: 20) строим переходные характеристики нашей системы:
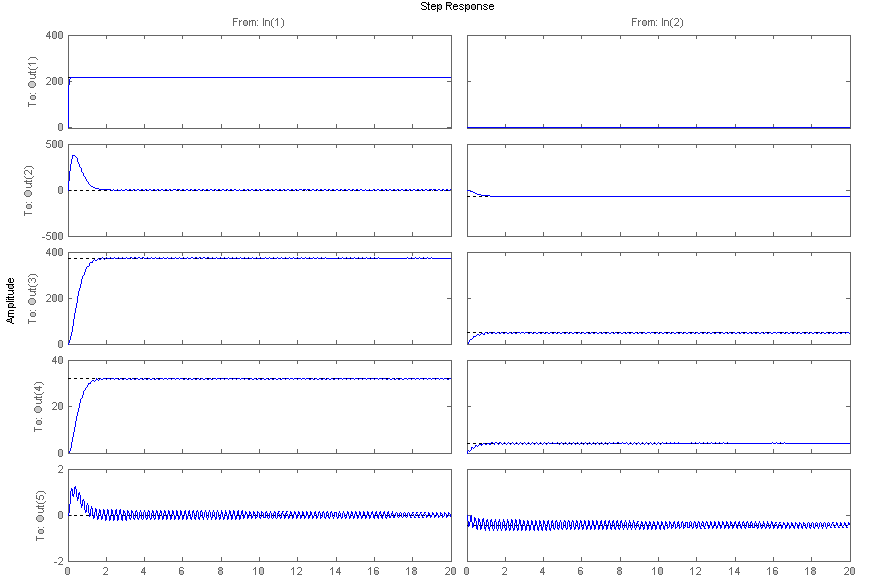
5.4. В ходе моделирования было установлено, что переходные процессы в отдельно рассматриваемых системах тиристорный преобразователь – двигатель и механизм отдельно от двигателя имеют те же частоты, что и соответствующие переходные процессы при рассмотрении электромеханической системы целиком. Это говорит о правильности математического описания нашей электромеханической системы целиком.
6.0. Общий вид структурной схемы двухмассовой электромеханической системы с передаточными функциями представлен на рисунке 18:
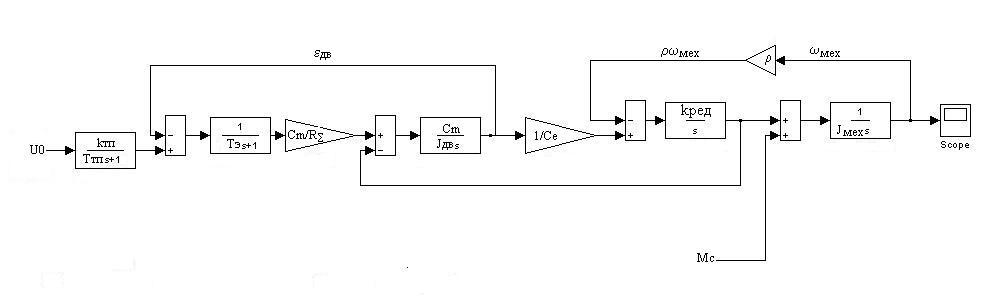
Рис.18.
Для нашей системы нашей системы структурная схема представлена на рисунке 19.
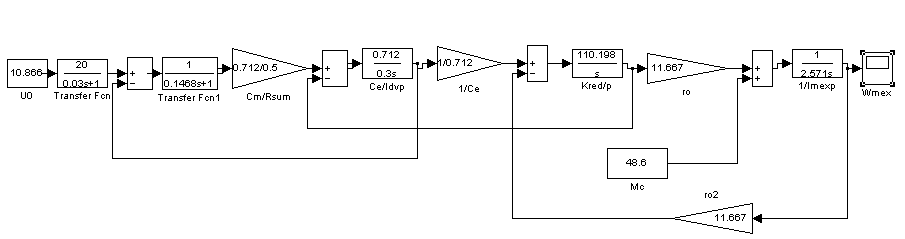
Рис.19
Вывод: в данной лабораторной работе нами изучена двухмассовая электромеханическая система, состоящая из двигателя постоянного тока независимого возбуждения с якорным управлением по схеме тиристорный преобразователь – двигатель, исполнительного механизма, редуктора и упругого звена. Было составлено математическое описание отдельных элементов данной системы и математическая модель системы целиком. Выполнено моделирование переходных процессов в отдельных частях этой системы и в системе в целом. На основании полученных результатов, можно сказать, что переходный процесс в тиристорном преобразователе носит апериодический характер, тогда как переходные процессы в остальных частях системы имеют колебательный вид.