

лабораторная работа / лаба 3
.doc
Кафедра автоматики и управления в технических системах
ОТЧЕТ
по лабораторной работе №3 по дисциплине
«Электромеханические системы»
Исследование нелинейной двухмассовой разомкнутой системы.
Москва 2010
Задание
по лабораторной работе №3.
Для двигателя постоянного тока независимого возбуждения
с якорным управлением по схеме тиристорный преобразователь - двигатель, соединённого с исполнительным механизмом через редуктор и упругое звено, и имеющих параметры:
Номинальная мощность, кВт 1,0
Номинальное напряжение, В 210
Номинальная скорость вращения, об/мин 2800
Номинальный ток, А 5,85
Момент инерции якоря,кг.м2 0.3
Скорость вращения вала
исполнительного механизма, об/мин 240
Момент инерции исполнительного механизма, кг.м2 30
Сопротивление якорной цепи, Ом 0,25
Жёсткость выходного (медленного) вала редуктора, Нм/рад 15000 постоянная времени тиристорного преобразователя, с 0. 03
коэффициент усиления тиристорного преобразователя 20
сопротивление якорной цепи тиристорного преобразователя и индуктивность якорной цепи тиристорного преобразователя принять равными тем же значениям параметров якорной цепи двигателя.
Приведённый коэффициент вязкого трения упругого звена, Нм/рад/с 5,2
Приведённый кинематический зазор, рад 0,35
Выполнить моделирование электромеханической системы с учётом:
-
нелинейности характеристики тиристорного преобразователя;
-
кинематического зазора в зубчатой передаче редуктора;
-
диссипативных сил в упругом звене;
Форма характеристики тиристорного преобразователя задана таблицей, устанавливающей связь между входной (управляющие ампервитки – AW) и выходной (Э.Д.С. тиристорного преобразователя – E) координатами в относительных единицах (процентах от максимального значения координаты). Точку с координатами AW=37 и E=81 принять за номинальную точку характеристики.
|
AW |
0 |
20 |
37 |
40 |
60 |
80 |
100 |
|
E |
0 |
54 |
81 |
85.5 |
96 |
99 |
100 |
1.Составить исходную расчётную схему электромеханической системы (момент нагрузки приложен к валу исполнительного механизма).
2.Составить расчётную схему электромеханической системы с приведенными параметрами (момент нагрузки приложен к валу исполнительного механизма).
3.Составить уравнения для динамического режима работы системы (в общем виде и с числовыми коэффициентами),
4.Выполнить моделирование динамических процессов при номинальном напряжении якоря и моменте нагрузки, равном номинальному моменту двигателя (приведенном к валу двигателя).
4.1.Построить нелинейную характеристику тиристорного преобразователя.
4.2. Составить структурную схему решения с учётом нелинейностей
4.3. Построить переходные характеристики для ЭДС тиристорного
преобразователя, тока, скорости двигателя, деформации валопровода
Выполнение.
1. Расчётная схема двухмассовой электромеханической системы (момент нагрузки приложен к валу исполнительного механизма) представлена на рисунке 1.

Рис.1
Составим уравнения, описывающие механическую часть этой системы. Эти уравнения будем составлять в виде уравнений Лагранжа второго рода. За обобщённые координаты примем угол поворота вала двигателя двиг и исполнительного механизма мех. Запишем выражение для кинетической энергии данной системы:
 (1)
(1)
В этом выражении Jдвиг Jмех – моменты инерции якоря двигателя и исполнительного механизма соответственно.
Вычислим производные от этой энергии:
 (2)
(2)
Запишем выражения для потенциальной
энергии системы. Как известно, потенциальная
энергия деформации
![]() ,
где
,
где
k – физическая жёсткость
медленного вала,
![]() ,
,
![]() -
действительная крутильная деформация
упругого вала,
-
действительная крутильная деформация
упругого вала,
![]() .
.
Итак, для системы:
![]() (3)
(3)
Вычислим производные от этой энергии:
![]() (4)
(4)
![]() - жесткость валопровода, приведённая к
валу двигателя.
- жесткость валопровода, приведённая к
валу двигателя.
![]() - угол деформации валопровода, приведённый
к валу двигателя.
- угол деформации валопровода, приведённый
к валу двигателя.
![]() (5)
(5)
Работа обобщённой неконсервативной силы:
 (6)
(6)
Итак, уравнения для механической части системы без учёта диссипативных сил:
 (7)
(7)
Учтём работу диссипативной силы:
![]() (8)
(8)
Заменим
![]() перемещение в схеме с приведёнными
параметрами
перемещение в схеме с приведёнными
параметрами
![]() (8)
(8)
Тогда
 (9)
(9)
И окончательно, система уравнений, описывающая механическую часть системы с учетом диссипативной силы, принимает вид:
 (10)
(10)
2. На основе системы уравнений 10 составляем расчётную схему с приведёнными параметрами:

Рис.2
 (11)
(11)
![]() - не приведённый момент инерции механизма.
- не приведённый момент инерции механизма.
![]() - приведённый коэффициент вязкого трения
упругого звена.
- приведённый коэффициент вязкого трения
упругого звена.
3.Составим уравнения, описывающие данную электромеханическую систему. Для этого, вначале, составим уравнение, описывающее тиристорный преобразователь с учётом нелинейности его характеристики. Тиристорный преобразователь описывается уравнением нелинейного инерционного звена:
![]() (12)
(12)
Где
![]() - обратная характеристика от Э.Д.С.
тиристорного преобразователя
- обратная характеристика от Э.Д.С.
тиристорного преобразователя
![]() (13)
(13)
![]() - управляющее ампервитки номинальные.
Для нашего случая
- управляющее ампервитки номинальные.
Для нашего случая
![]() =
=![]()
Составим уравнение 12 для нашего тиристорного преобразователя. В предыдущих лабораторных работах получено, что:

Тогда
![]() (14)
(14)
![]() (15)
(15)
Выполним пересчёт таблицы, описывающий характеристику тиристорного преобразователя из относительных единиц в абсолютные:
![]()
![]()
|
|
|
|
0 |
0 |
|
0,54 |
140,972 |
|
0,81 |
211,459 |
|
0,855 |
223,206 |
|
0,96 |
250,618 |
|
0,99 |
258,449 |
|
1,0 |
261,04 |
|
|
|
|
0 |
0 |
|
0,2 |
58,736 |
|
0,37 |
108,662 |
|
0,4 |
117,472 |
|
0,6 |
176,208 |
|
0,8 |
234,944 |
|
1,0 |
293,68 |
И окончательно, уравнение, описывающие тиристорный преобразователь, будет иметь следующий вид:
 (16)
(16)
Теперь запишем систему уравнений, описывающую всю систему в целом с учетом нелинейности характеристики тиристорного преобразователя, диссипативных сил и кинематических зазоров. В общем виде эта система уравнений имеет следующий вид:
 (17)
(17)
В этих уравнениях:
AWрез – результирующие
ампервитки, подаваемые на вход тиристорного
преобразователя,
![]()
TТП – постоянная времени тиристорного преобразователя, [с];
Т – Э.Д.С. тиристорного преобразователя, [В];
I – ток якоря двигателя, [А];
R=RТП+Rдвиг – суммарное сопротивление тиристорного преобразователя и якоря двигателя, [Ом];
L=LТП+Lдвиг - суммарная индуктивность тиристорного преобразователя и якоря двигателя, [Гн];
Се – электрическая постоянная двигателя,
![]() ;
;
двиг – угол поворота вала
двигателя,
![]() ;
;
мех – угол поворота исполнительного
механизма,
![]() ;
;
СМ –механическая постоянная
двигателя,
![]() ;
;
- передаточное число редуктора;
Mc –
приведённый момент сопротивления
вращению двигателя,
![]() ;
;
![]() - момент инерции якоря двигателя,
- момент инерции якоря двигателя,
![]()
![]() - приведённый момент инерции механизма,
- приведённый момент инерции механизма,
![]() ;
;
- действительная крутильная деформация валопровода, [рад];
![]() - жесткость валопровода, приведённая к
валу двигателя,
- жесткость валопровода, приведённая к
валу двигателя,
![]() ;
;
ред – приведенный коэффициент
вязкого прения упругого звена,
![]() ;
;
- приведённый кинематический зазор,
![]() .
.
Запишем эти уравнения применительно к нашему двигателю:
 (18)
(18)
 (19)
(19)
![]() 4.
Выполним моделирование динамических
процессов в системе. Для этого приведём
систему уравнений 19 к следующему виду:
4.
Выполним моделирование динамических
процессов в системе. Для этого приведём
систему уравнений 19 к следующему виду:
![]()
 (20)
(20)
4.1.Используя MATLAB, получаем нелинейную характеристику тиристорного преобразователя.
![]() Вычислим
величины входных воздействий:
Вычислим
величины входных воздействий:
![]()
![]() (21)
(21)
![]() Схема
решения системы 20 в Simulink
для заданных входных воздействий имеет
вид:
Схема
решения системы 20 в Simulink
для заданных входных воздействий имеет
вид:
![]()

![]() Рис.3
Рис.3
Блок Look-Up-Table используется для задания обратной характеристики тиристорного преобразователя.
![]() В
результате моделирования получены
следующие графики переходных процессов:
В
результате моделирования получены
следующие графики переходных процессов:
![]()
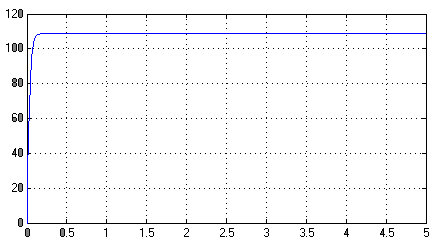
![]() Рис.4
Э.Д.С. тиристорного преобразователя
Рис.4
Э.Д.С. тиристорного преобразователя
![]()

![]() Рис.5
Ток якоря двигателя
Рис.5
Ток якоря двигателя
![]()

![]() Рис.6
Скорость вращения двигателя
Рис.6
Скорость вращения двигателя

![]() Рис.7
Скорость вращения исполнительного
механизма
Рис.7
Скорость вращения исполнительного
механизма
![]()

![]() Рис.8
Деформация валопровода
Рис.8
Деформация валопровода
Вывод: в данной лабораторной работе выполнено исследование электромеханической системы с учётом её нелинейностей. Как и следовало ожидать, полученные переходные процессы отличаются от линейного случая. Если говорить о переходных характеристиках Э.Д.С. тиристорного преобразователя и токе якорной цепи двигателя, то их отличие от линейного случая невелико. Переходные характеристики скоростей двигателя и механизма имеют меньшие установившиеся значения, нежели в линейном случае.