

лабораторная работа / Расчет системы управления электроприводом с подчиненным регулированием координат
.docСАРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО – СТРОИТЕЛЬНЫЙ
КАФЕДРА «УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ»
Практическая работа №2
по дисциплине:
Электромеханические системы
Расчет системы управления электроприводом
с подчиненным регулированием координат
Выполнили ст. гр. УИТ-52
Телегин Е.Г.____________
Принял преподаватель
Мефедова Ю.В.__________
«____» ____________ 2008г.
Балаково 2008
Цель работы:
Расчет двухконтурной системы управления электроприводом постоянного тока с подчиненным регулированием координат.
Исходные данные.
Силовая часть электропривода представляет собой систему тиристорный преобразователь – двигатель постоянного тока с независимым возбуждением.
Номинальные напряжения, ток, момент и скорость двигателя:
UНОМ=60 В, IНОМ=2.27 А, МНОМ=0,49 Н·м, ωНОМ=209 рад/с.
Сопротивление и индуктивность якоря и момент инерции двигателя:
RЯ=0,94 Ом, LЯ=0,038 Гн, J=0,00153 кг·м2.
Коэффициент усиления и постоянная времени преобразователя:
kП=50, ТП=Тμ=0,008 с.
Передаточный коэффициент тахогенератора (обратная связь по скорости):
kТГ= kОС=0,024 В·с/рад.
Передаточный коэффициент обратной связи по току:
kОТ =1,47 В/А.
Решение.
1) Рассчитаем недостающие параметры.
Коэффициент ЭДС kЕ:
![]() ,
В·с.
,
В·с.
Коэффициент момента kМ:
![]() ,
Н·м А-1.
,
Н·м А-1.
Электромагнитная постоянная времени двигателя:
![]() с.
с.
Механическая постоянная времени двигателя:
![]() с.
с.
Вспомогательный коэффициент k0:
![]() ,
А/В.
,
А/В.
2) Настроим внутренний контур тока на технический оптимум. Передаточная функция регулятора тока согласно (9):
![]() .
.
Передаточная функция замкнутого контура, согласно (11):
![]() .
.
Исследование внутреннего контура с регулятором и без, осуществляется самостоятельно, путем построения переходных процессов и логарифмических амплитудно-частотных характеристик.
3) Настроим внешний контур скорости на технический и симметричный оптимум. Передаточная функция регулятора скорости, настроенного на ТО, согласно (13):
![]() .
.
Передаточная функция регулятора скорости, настроенного на СО, согласно (16):
![]() .
.
4) Исследуем систему управления электропривода. На рис.1 представлены переходные процессы системы ( h(t) – без регулятора скорости, hrs1(t) – с регулятором, настроенным на ТО, hrs2(t) – с регулятором, настроенным на СО). На рис.2 соответственно представлены логарифмические амплитудно-частотные характеристики (ЛАЧХ). По построенным графикам определяются все характеристики и делаются выводы о влиянии на качество процессов регуляторов, настроенных на технический и симметричный оптимум.

Рис.1. Переходные процессы внешнего контура скорости
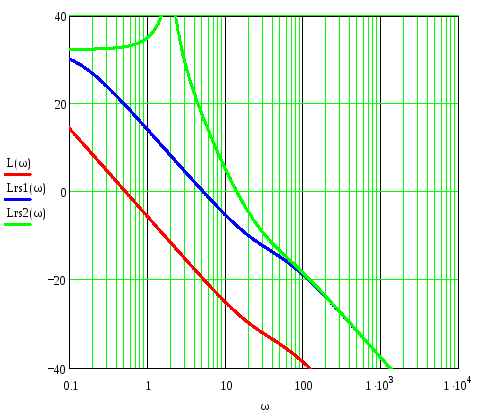
Рис.2. ЛАЧХ внешнего контура скорости
5) Определим параметры ПИ-регуляторов.
Параметры усилительного и интегрирующего звеньев ПИ-регулятора тока, равны соответственно: kП=0,032313, ТИ=1,251. Зададимся значением емкости С=1 мкФ, тогда с учетом (18):
![]() кОм,
кОм,
![]() кОм.
кОм.
Параметры усилительного и интегрирующего звеньев ПИ-регулятора скорости, равны соответственно: kП=9,8182, ТИ=3,3·10-3. Зададимся значением емкости С=0,5 мкФ, тогда с учетом (18):
![]() кОм,
кОм,
![]() кОм.
кОм.
Вывод:
В ходе выполнения данной работы был произведен расчет двухконтурной системы управления электроприводом постоянного тока с подчиненным регулированием координат. В результате по переходным характеристикам было установлено, что система без регулятора находится в неопределенном состоянии, а системы с регулятороми достигают установившегося состояния за 22 с, причем перерегулирование в системе при настройке контура тока на технический оптимум уменьшается в ≈2 раза по сравнению с настройкой на симметричный оптимум. Также по ЛАЧХ было установлено, что с регулятором, система имеет более широкую полосу пропускания, а следовательно меньшее время переходного процесса контура.