

Глава четвертая
ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ
Асинхронные двигатели (АД) являются в настоящее время самым распространенным видом электродвигателя в промышленности и сельском хозяйстве. Это определяется рядом преимуществ АД по сравнению с другими видами двигателей: он более прост и надежен в эксплуатации, для его изготовления требуется меньше цветных металлов, он имеет меньшие массу, габариты и стоимость, чем двигатели постоянного тока.
До недавнего времени АД применялись главным образом в нерегулируемом электроприводе. Вместе с тем в связи с появлением серийно выпускаемых электротехнической промышленностью силовых тиристорных устройств – преобразователей напряжения и преобразователей частоты – растет число регулируемых электроприводов с АД. Такие электроприводы имеют хорошие регулировочные и массогабаритные свойства, а также стоимостные показатели. В связи с этим применение в народном хозяйстве регулируемого асинхронного электропривода представляет собой важное направление в развитии электропривода.
4.1. Схема включения, статические характеристики * и режимы работы ад
Основная схема включения трехфазного АД и соответствующая ей упрощенная схема замещения с вынесенным контуром намагничивания показаны на рис. 4.1, а, б.

На схемах приняты следующие обозначения:
U1,
Uф –
действующие значения линейного и фазного
напряжения сети; I1, I,
I2 – фазные токи
статора, намагничивания и приведенный
ротора; х1, x,
х2 – индуктивные фазные
сопротивления статора, контура
намагничивания и приведенное ротора;
Rc,
R1д, R1=Rc+R1д
– активные фазные сопротивления обмотки
статора, добавочного резистора и
суммарное фазы статора;
![]() ,
,
![]() ,
,
![]() – активные приведенные к обмотке статора
фазные сопротивления обмотки ротора,
добавочного резистора и суммарное фазы
ротора; s=(0–)/0
– скольжение АД; 0=2fl/p
– угловая скорость магнитного поля АД
(синхронная скорость); f1
– частота питающего напряжения; p
– число пар полюсов АД.
– активные приведенные к обмотке статора
фазные сопротивления обмотки ротора,
добавочного резистора и суммарное фазы
ротора; s=(0–)/0
– скольжение АД; 0=2fl/p
– угловая скорость магнитного поля АД
(синхронная скорость); f1
– частота питающего напряжения; p
– число пар полюсов АД.
Электромеханическая характеристика =f(I2) АД описывается выражением, получаемым непосредственно из рассмотрения схемы рис. 4.1, б,
![]() (4.1)
(4.1)
где
![]() – индуктивное фазное сопротивление
короткого замыкания.
– индуктивное фазное сопротивление
короткого замыкания.
Отметим, что электромеханические и механические характеристики АД часто представляются в виде зависимости тока и момента от скольжения s. В этом случае получаемые аналитические выражения имеют компактную форму записи и более удобны для анализа и вычислений.
На рис. 4.2 приведены электромеханические
характеристики =f(![]() )
и =f(
)
и =f(![]() ).
Проанализируем их характерные точки.
).
Проанализируем их характерные точки.
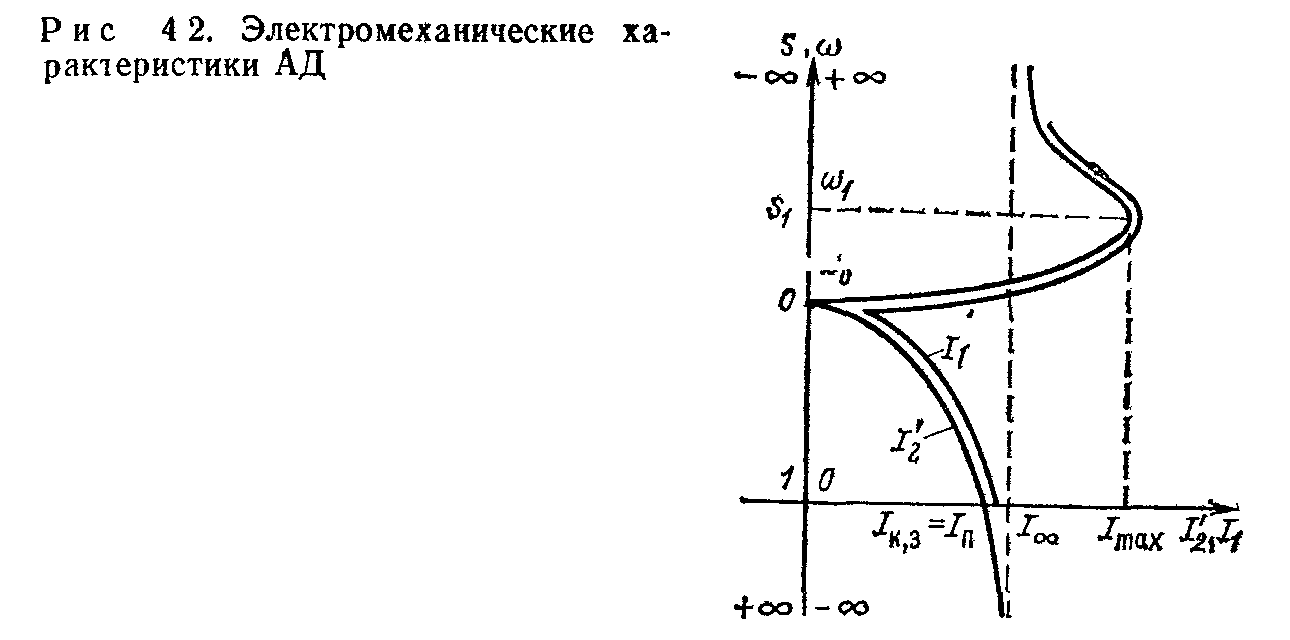
На оси ординат отложены и скорость, и скольжение, которые однозначно связаны между собой соотношением
![]() (4.2)
(4.2)
а на оси абсцисс – приведенные токи ротора и статора.
Характерные точки электромеханической характеристики следующие.
1) s=0,
=0,
![]() =0,
I1=I0
– точка идеального холостого хода;
=0,
I1=I0
– точка идеального холостого хода;
2) s=l, =0, I1=Iк,з=Iп – точка короткого замыкания;
3) s1=![]() ,
1=0(1–s1),
,
1=0(1–s1),
![]() – точка максимального значения тока
ротора, лежащая в области отрицательных
скольжений;
– точка максимального значения тока
ротора, лежащая в области отрицательных
скольжений;
4) s±, ,1/ф/1+д; – асимптотическое значение тока ротора при бесконечно большом увеличении скольжения и скорости.
Выражение для механической характеристики АД можно получить, рассмотрев баланс мощности в цепи ротора. Потери мощности в цепи ротора Р2, выраженные через механические координаты АД, представляют собой разность электромагнитной мощности Рэм=М0 и полезной механической мощности Р2=М, т. е.
![]() (4.3)
(4.3)
Отметим, что вследствие зависимости потерь в роторе от скольжения их часто называют потерями скольжения.
Те же потери мощности, выраженные через электрические величины, определяются как
![]() (44)
(44)
Приравнивание потерь по (4.3) и (4.4) приводит к следующему выражению:
![]() (4.5)
(4.5)
3амена в (4.5) тока
![]() его
выражением по (4.1) приводит к следующей
формуле:
его
выражением по (4.1) приводит к следующей
формуле:
 (4.6)
(4.6)
которая является одной из форм математического представления механической характеристики M(s).
Исследование полученной зависимости M(s) на экстремум, которое осуществляется нахождением производной dM/ds и приравниванием ее нулю, обнаруживает наличие двух экстремальных точек. В этих точках момент и скольжение АД выражаются как
 (4.7)
(4.7)
 (4.8)
(4.8)
причем знак «+» в(4.7) и (4.8) относится к области скольжения s>0, а знак «–» – к s0. Значения момента Мк и скольжения sк АД, соответствующие экстремальным точкам, получили название максимальных или критических.
Если разделить выражение (4.6) на (4.7) и выполнить несложные преобразования, то можно получить другую, более компактную и удобную форму записи механической характеристики
![]() (4.9)
(4.9)
где
![]()
Характерные точки механической характеристики следующие:
1) s=0, =0, M=0 – точка идеального холостого хода;
2) s=l, =0, М=Мк,з=Мп – точка короткого замыкания;
3) s=sкд, М=Мк,д,, s=–sк,г, Мк=–Мк,г– точки экстремума;
4) s±,
![]() ,
М0
– асимптота механической характеристики,
которой является ось скорости.
,
М0
– асимптота механической характеристики,
которой является ось скорости.
На рис 4.3 приведена механическая характеристика АД. Отметим, что она соответствует определенному чередованию фаз питающего напряжения сети U1. При изменении порядка чередования двух фаз АД имеет аналогичную механическую характеристику, которая располагается симметрично относительно начала координат.

В некоторых случаях при построении механической характеристики используют приближенные формулы. Упрощение может быть получено, если пренебречь активным сопротивлением статора, т.е. считать R1=0. В этом случае выражения (4.7), (4.8) и (4.9) принимают соответственно вид
![]() (4.10)
(4.10)
![]() (4.11)
(4.11)
![]() (4.12)
(4.12)
Если в (4.10) вместо текущих значений момента и скольжения подставить их номинальные значения Мном и sном и обозначить кратность максимального момента Мк/Мном через м, то из (4.10) может быть найдена формула, связывающая критическое и номинальное скольжения,
![]() (4.13)
(4.13)
Эта формула может использоваться для определения 5ц по каталожным данным АД.
Дальнейшее упрощение (4.10) может быть выполнено для области малых скольжений, в которой можно пренебречь отношением s/sк:
![]()
Полученная формула описывает так называемый рабочий участок характеристики двигателя, на котором находится точка номинального режима с координатами Мном, Iном, ном, sном,.
Энергетический режим работы АД определяется значением и знаком скольжения, а именно (рис. 4.3):
1) s=0, =0 – режим идеального холостого хода;
2) s=l, =0 – режим короткого замыкания;
3) 0<s<l, 0<<0 – двигательный режим;
4) s<0, >0 – генераторный режим (рекуперативный);
5) s>l, <0 – генераторный режим (противовключение).
Кроме того, АД может работать в генераторном режиме независимо от сети переменного тока, который называется режимом динамического торможения. В этом режиме обмотка статора АД отключается от сети переменного тока и подключается к источнику постоянного тока, а цепь ротора замыкается накоротко или на добавочные резисторы. Подробно схема включения АД и его характеристики в этом режиме рассмотрены в § 4.10.
Пример 4.1. Рассчитать и построить механическую характеристику АД, имеющего следующие технические данные Рном=13 кВт; nном=1450 об/мин; ном=151 рад/с; м=2, р=2; f1ном=50 Гц.
1 Определяем скорость идеального холостого хода
![]()
2 Определяем номинальный момент
![]()
3 Определяем номинальное скольжение
![]()
Полученных данных достаточно для приближенного построения рабочего участка механической характеристики АД по двум точкам – номинальной (ном, Mном) и холостого хода (0, 0). Для получения всей механической характеристики продолжаем расчет.
4 Определяем критический момент АД
![]()
5 Определяем по (4 13) критическое скольжение АД, принимая в ней знак «+»,
![]()
6 Подставляем найденные значения Мк и sк в упрощенную формулу (4.10)
![]()
7. Задаваясь значениями скольжения s в пределах от 0 до 1, определяем по (4.10) момент АД и строим механическую характеристику (рис 4.4).
