

Л а б о р а т о р н а я р а б о т а № 7 Изучение устройства управления укм – 772
Ц е л ь р а б о т ы: изучение принципа работы контурного устройства управления УКМ –772 М и его возможностей при управлении роботами с электромеханическими приводами.
Общие положения
Цель управления роботом ТУР-10К состоит в организации таких воздействий на его исполнительные приводы, которые приведут к координированному перемещению рабочего органа из исходного положения в заданное или к плавному движению рабочего органа по непрерывной заданной пространственной траектории. При этом отклонение положения рабочего органа от заданного должно находиться в пределах ±0,25 мм, отклонение траектории - в пределах 2 мм (см. технические характеристики робота). Для осуществления движения рабочего органа по непрерывной траектории устройство управления роботом ТУР-10К должно обеспечить синхронную и согласованную отработку заданных траекторий всеми степенями подвижности манипулятора. Такая система управления называется контурной. Характерной особенностью роботов с контурной системой управления является наличие следящего привода по каждой степени подвижности манипулятора.
Конструкция робота ТУР-10К такова, что в нем отсутствует кинематическое взаимовлияние степеней подвижности (исключение составляют движения сгиба и вращения кисти в механизме ориентации).
Каждое звено манипулятора приводится в движение от независимого электропривода. Устройство управления каждым электроприводом (т.е. одной степенью подвижности) робота принципиально представляет собой совокупность двух блоков - блока задания (формирования) программы движений привода и блока её отработки (следящей системы привода). Основная задача следящей системы состоит в обеспечении требуемой точности отработки приводом программных движений.
На рис. 17 показана функциональная схема устройства управления одной степенью подвижности робота ТУР-10К, где отражено физическое разделение блоков системы.
В составе следящей системы устройства управления можно выделить три части:
I - исполнительный двигатель манипулятора, кинематически связанный с объектом; согласующий редуктор и измерительные элементы - датчик положения и датчик скорости (тахогенератор).
Р ис.
17. Функциональная схема следящей системы
привода
ис.
17. Функциональная схема следящей системы
привода
II - блок управления электроприводами;
III - модули устройства управления, реализующие закон регулирования. Конструктивно устройство управления робота выполнено в виде двух стоек - устройства числового программного управления УКМ-772, серийно выпускаемого ПО ЛЭМЗ, и блока управления электроприводами (БУЭП).
Устройство УКМ-772 построено на базе микроЭВМ “Электроника-60”, обеспечивает контурное управление роботом с системой отсчета в абсолютных размерах, имеет 15 двоичных разрядов и 1 знаковый для обработки информации с линейной интерполяцией. Метод программирования - обучение, программоноситель - кассета МК-60 с магнитной лентой по ГОСТ 20492-75.
Обозначение устройства УКМ-772 расшифровывается следующим образом: У- универсальное, К- контурное, М- модульное, 7- число управляемых координат, 7- число одновременно управляемых координат, 2- с выходом на замкнутую систему привода с двигателями постоянного тока. (Если в конце поставлена цифра 1, то устройство предназначено для управления разомкнутым шаговым двигателем, что возможно в системах циклового и позиционного управления).
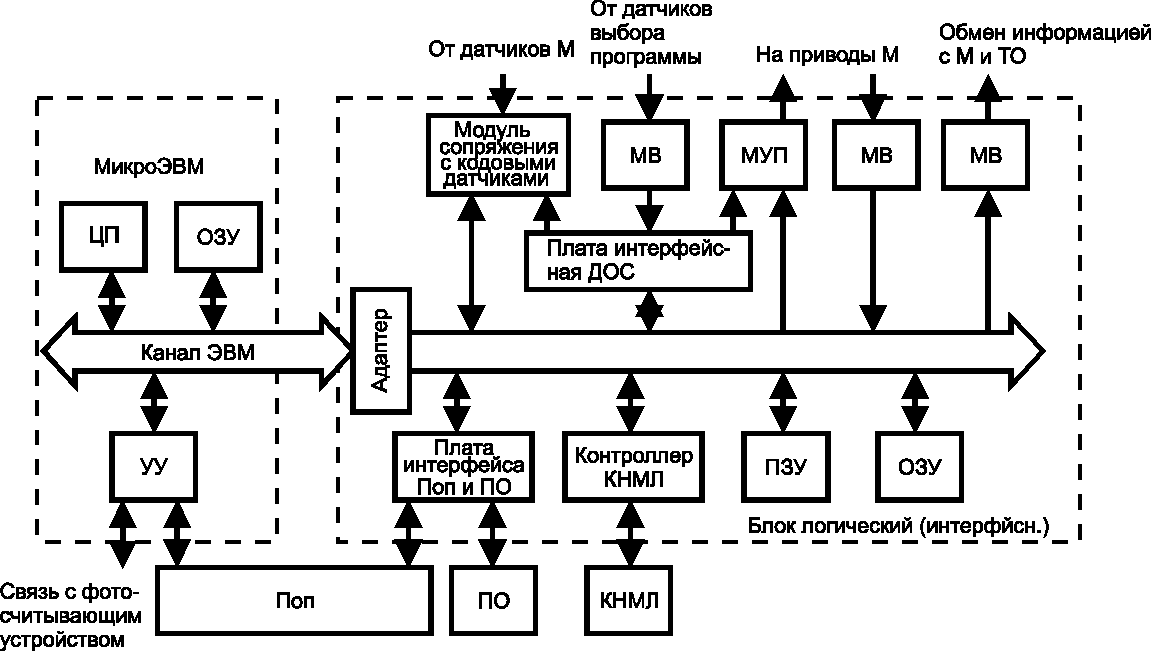
Рис. 18. Структурная схема системы управления УКМ - 772
В состав УКМ-772 входят (рис. 18): микроЭВМ “Электроника-60”, кассетный накопитель на магнитной ленте КНМЛ “Искра 005-33”, пульт оператора ПОп, пульт обучения (выносной) ПО, блок логический, аппаратура питания и вентиляции. Задача микроЭВМ “Электроника-60” - обработать управляющую программу, принятую с пульта оператора или кассетного накопителя, выдать сигналы управления на следящие приводы манипулятора и в шкаф электроавтоматики оборудования в режиме обработки программы. Математическое обеспечение УКМ-772 вводится с помощью перфоленты.
Управляющая программа робота содержит информацию о пространственном положении звеньев манипулятора по всем степеням подвижности (т. е. значения обобщенных координат манипулятора), о последовательности и времени выполнения отдельных шагов программы и отдельных управляющих команд.
Простейшей единицей управляющей программы робота является команда, соответствующая единичной операции робота (перемещение одной степени подвижности, открывание или закрывание захватного устройства, выдержка времени, выдержка технологической команды). В зависимости от характера единичной операции в УЧПУ УКМ-772 ей соответствует число от 1 бит информации (операции типа включить- выключить) до 15 бит (и 1 знаковый) для задания координат точного позиционирования звена робота.
Группе единичных операций, имеющих законченный смысл (перемещение захватного устройства в заданную точку при одновременной работе нескольких степеней подвижности), соответствует группа шагов, называемая кадром управляющей программы. Кадры могут объединяться в подпрограммы, соответствующие законченной последовательности действий робота.
Формирование управляющей программы робота ТУР-10К с помощью существующего в УКМ-772 программного обеспечения осуществляется в режиме “Обучение”. Суть его заключается в том, что оператор, управляя роботом от специального пульта обучения, последовательно выводит рабочий орган в нужное положение (узловую точку) и затем дает сигнал на запись. В этот момент информация о значении обобщенных координат манипулятора считывается с датчиков обратной связи (ДОС) и заносится в оперативное запоминающее устройство (ОЗУ). По окончании процесса обучения сформированная управляющая программа переписывается в кассетный накопитель. Распределение управляющей программы и управление её перезаписью осуществляется микроЭВМ.
При отработке управляющей программы информация о траектории движения, величинах скоростей исполнительных звеньев манипулятора, подготовительных и технологических функциях, представляющая собой последовательность кадров, считывается с ленты кассетного накопителя, обрабатывается с помощью микроЭВМ и блока логического и передаётся на исполнительные органы манипулятора и оборудование.
Устройство УКМ-772 обеспечивает работу в следующих режимах: “Разметка магнитной ленты”, “Ввод”, “Вывод”, “Выбор программы”,
“Обучение”, “Автоматическая работа однократная”, “Покадровая отработка” , “Поиск кадра”, “Контроль”.
Робот ТУР-10К и его устройство управления позволяет, кроме программирования, линейной интерполяции и последующей автоматической работы в обобщенных координатах, реализовать прямолинейные траектории в плоскости манипулятора в системах координат, связанных с основанием и с захватным устройством, осуществлять программную развязку движения сгиба и вращения кисти. Для программирования устройства управления робота при работе в контурном режиме используются математические модели, описывающие кинематику и динамику манипулятора
Порядок выполнения работы
В процессе выполнения работы необходимо:
1. Изучить назначение, технические характеристики и общее устройство системы управления УКМ – 772 робота ТУР-10К по натурному образцу;
2. Изучить функциональную схему степени подвижности робота, назначение ее блоков и их характеристики;
3. Изучить структурную схему системы управления, состав и назначение блоков, их взаимосвязь.
Содержание отчета
1. Наименование и цель лабораторной работы.
2. Сведения о назначении, технических данных, краткое описание устройства управления УКМ 772 робота ТУР-10К.
3. Функциональная схема электромеханического привода;
4. Структурная схема устройства управления УКМ – 772;
5. Выводы.
Контрольные вопросы
1. Назовите технические характеристики устройства управления УКМ – 772 промышленного робота ТУР –10К.
2. Какие виды приводов применяются для работы с системой управления УКМ - 772?
3. Чем контролируются перемещения звеньев ПР ТУР –10К и куда поступают их сигналы?
4. Чем контролируется скорость перемещения звеньев и какой регулятор используется в контуре регулирования скорости?
5. Каким образом происходит программирование перемещений?
6. Что является основой изучаемой системы?