

Л а б о р а т о р н а я р а б о т а №4 Исследование влияния настройки давления сжатого воздуха и массы груза на характеристики привода
![]()
Ц е л ь р а б о т ы: дать оценку влияния входного давления сжатого воздуха на работоспособность привода.
Общие![]() положения
положения
Уравнения
динамики поршня пневматического
двигателя с учетом действующих на
него сил может быть описано следующим
выражением:![]()
![]() ,
,
где
mx - сила преодоления инерционности массы
подвижных частей двигателя выдвижения
захватного устройства (масса поршня со
штоком + масса перемещаемого груза);
![]() x
- величина., учитывающая демпфирование
при утечке воздуха между поршнем и
стенками цилиндра;
x
- величина., учитывающая демпфирование
при утечке воздуха между поршнем и
стенками цилиндра;![]() - сумма сил, действующих на поршень
(трение, постоянное внешнее усилие и
др.).
- сумма сил, действующих на поршень
(трение, постоянное внешнее усилие и
др.).
Из выражения следует, что с возрастанием массы полезного груза для обеспечения требуемой скорости необходимо увеличить перепад давления на поршень
![]() .
.
При постоянном входном давлении сжатого воздуха на двигателе с увеличением массы груза скорость выходного звена уменьшается.
Для исследования влияния давления сжатого воздуха и массы переносимого груза используется установка, схема которой приведена на рис.6.
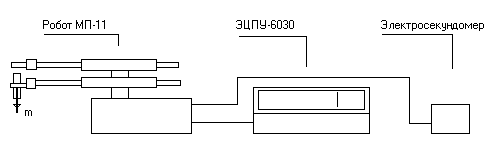 Рис.6.
Схема экспериментальной установки
Рис.6.
Схема экспериментальной установки
Порядок выполнения работы
В процессе выполнения работы необходимо:
1. Подготовить робот к работе. При номинальном давлении питания сжатым воздухом р=0,40,5 МПа обеспечить на холостом ходу максимальные скорости выдвижения захвата, подъёма и поворота ИУ робота.
2. Последовательно при давлениях питания сжатым воздухом р=0,2рном; р=0,5рном; р=0,75рном; р=рном в режиме ручного управления обеспечить 5-6-кратное выполнение команд каждой степени подвижности прямого и обратного направлений движения на холостом ходу, при различных значениях масс m полезного груза: 0,25mном; 0,5mном; 0,75mном; mном ; при этом принять mном=0,2кг.
3. В процессе выполнения команд оценить работоспособность и характеристики привода:
- плавность прямого и обратного ходов без нагрузки и под нагрузкой;
- надёжность срабатывания пневматических распределителей и КЭМов;
- характер демпфирования каждого движения;
- величину прямого и обратного ходов, время перемещения;
- надёжность захвата и переноса груза;
- точность позиционирования.
4. Вычислить среднюю скорость линейного перемещения захватного устройства при прямом и обратном ходах.
5. Расчитать диаметры пневмоцилиндров для всех степеней подвижности.
6. Результаты испытаний систематизировать и оформить в ввиде таблиц и графиков.
Содержание отчета
1. Название и цель работы.
2. Схема испытаний.
3. Условия проведения.
4. Таблица и графики по результатам испытаний.
5. Анализ результатов и выводы.
Контрольные вопросы
1. Объясните физические основы изменения скорости пневматического привода при изменении нагрузки.
Какой диапазон изменения входного давления сжатого воздуха допустим для привода робота МП-9С?
Необходима ли регулировка дросселей соответствующих степеней подвижности при изменении нагрузки на 10%, 50%?
Необходимо ли перенастраивать амортизаторы соответствующих степеней подвижности при изменении нагрузки и давления?
Объясните возможные последствия для технологического процесса при резком отключении воздуха питания робота.