

Л а б о р а т о р н а я р а б о т а №2 программирование устройства управления роботом рф-202м
Ц е л ь р а б о т ы: получить практических навыков по эксплуатации устройства управления роботом РФ-202М.
Общие положения
Органы управления привести в исходное положение. Исходному положению кнопок соответствует их отжатое состояние. Исходному положению программного переключателя НОМЕР ПРОГРАММЫ - нулевое положение.
Включить систему управления нажатием кнопки ВКЛ.
Порядок работы оператора в режиме обучения.
1. Нажать кнопку ВКЛЮЧЕНИЕ ИНДИКАЦИИ.
2.
При нажатой кнопке СТИРАНИЕ нажать и
отпустить кнопку
![]() записи.
записи.
3. Установить переключатель НОМЕР ПРОГРАММЫ в положение 2...9.
4. Нажать кнопку обучения.
5. Вывести манипулятор в исходную точку.
6.
Записать координаты исходной точки,
для чего при нажатой кнопке начала
программы нажать и отпустить кнопку
![]() .
.
7. Записать время выдержки манипулятора в точке, нажимая кнопку ТАЙМЕР. Масштаб таймера задаётся оператором.
8.
Записать координаты промежуточных
точек, выводя манипулятор в эти точки
и нажимая кнопку
![]() .
.
9.
Вывести манипулятор в конечную точку,
которая должна соответствовать начальной.
Записать её, нажав и отпустив кнопку
![]() при нажатой кнопке конца программы
при нажатой кнопке конца программы![]() .
.
Рис.
2. Последовательность перемещений
манипулятора
Точка b
Точка b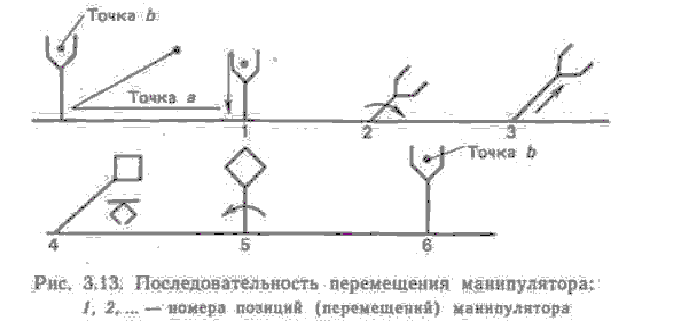
1,2 – Номера позиций (перемещений) манипулятора
Пусть манипулятору требуется перенести деталь из точки a в точку b. Используем для этой операции левое захватное устройство манипулятора. В исходном положении левое захватное устройство открыто и находится в точке b.
На рис.2 показана последовательность перемещений манипулятора (вид сверху), а в табл.3 - вариант программы (вариант 1), записываемой в запоминающее устройство системы управления.
Таблица 3. Фрагмент программы
|
Номер перемещения промежуточной точки |
Символика перемещения |
Комментарий |
|
1 |
|
Перемещение ИУ назад |
|
2 |
|
|
Порядок выполнения работы.
Подготовить устройство к работе в режиме обучения.
Записать программу в модуль памяти (вариант 1).
Составить программу (вариант 2) переноса детали с выдержкой 3,5 с. в точке 2 (табл. 3).
Записать программу в модуль памяти.
Проверить работу программ в режиме обучения.
Составить алгоритм работы устройства при отработке координат по времени в режиме обучения.
Перейти к работе в автоматическом режиме. Установить переключатель НОМЕР ПРОГРАММЫ в необходимое положение.
У становить
масштаб таймера кнопкой .
становить
масштаб таймера кнопкой .

Нажать кнопку автоматической работы .
Нажать кнопку ПУСК.
Для прерывания программы нажать кнопку СТОП.
Составить программу (вариант 3) синхронного переноса деталей
двумя захватными устройствами в соответствии с программой (вариант 1).
Записать программу в модуль памяти в режиме обучения.
Составить программу (вариант 4), которая отличается от программы варианта 3 введением временной задержки длительностью 9 с. в точке 2.
Проверить работу программ вариантов 1-4 в автоматическом режиме в соответствии с пп. 7-11.
Составить алгоритм работы устройства в автоматическом режиме при реализации технологических команд.
Содержание отчета
1. Схемы работы устройства в режиме обучения и в автоматическом режиме.
2. Задание.
3. Программы вариантов 1, 2, 3, 4 работы манипулятора.
4. Алгоритм работы устройства в режиме обучения и в автоматическом режиме при реализации технологических команд.
Контрольные вопросы
1. Объясните назначение кнопок управления.
2. Как задается режим ЦИКЛ?
3. Как задается режим АВТОМАТ?
4. Как задается выдержка времени?